Langaton videotiedon lähetin-nauhoija Ground Roverille

Käyttäjien käsikirja
Ohje
Q1: I require a ground rover’s 2km non-line-of-sight video transmission system (excluding the camera). I need to have control over the ground rover, not just one-way video transmission.
A1: The range of NLOS is difficult to determine precisely because of the impact of obstacles. Please see the video below. The fire-fighting robots used by Chinese firefighters also use this model of wireless video transmission system and data control instructions.
Q2: What if the obstacle is a building? How far can the transmission distance be?
The range or the type of obstacle is not quite clear in the video. Let me clarify my requirements.
Obstacle type: Let’s say between my rover and base station there is a building with 2500 sq meters space in between. I don’t need fire proofing on my antenna(if there’s any). For my system, I need omni antennas able to send control data and receive both data and a video stream. The range should be at least 1.2. 2km is recommended.
A2: At line-of-range, our client tested it can reach 1~2km. Can your project use a wireless signal repeater? Esimerkiksi, run a mini vehicle behind the transmitter ground robot to act as a repeater for the first ground rove to communicate with the receiver.
Q3: I have a very limited budget.
Don’t need to use a repeater. Are there any available for less than $1000?
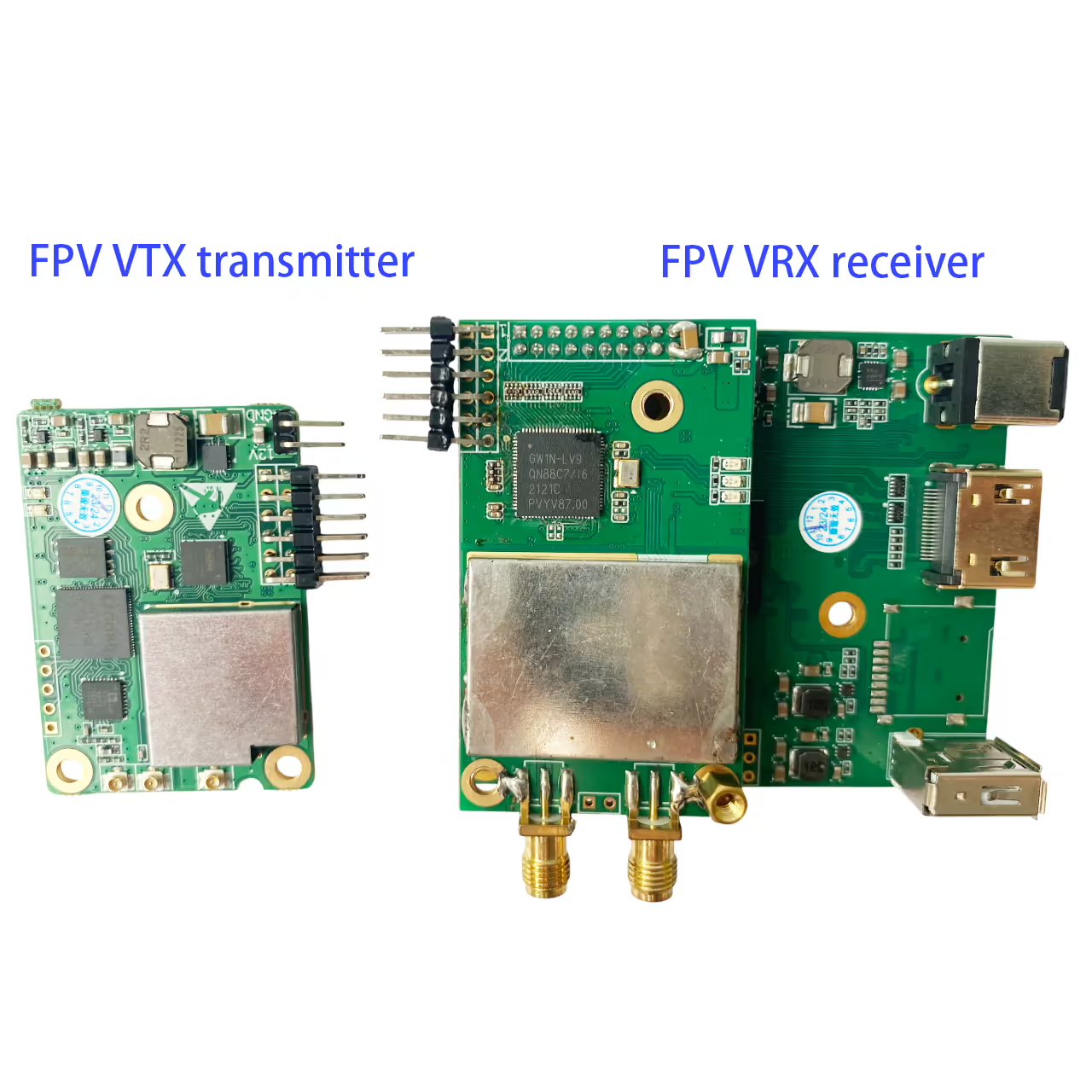
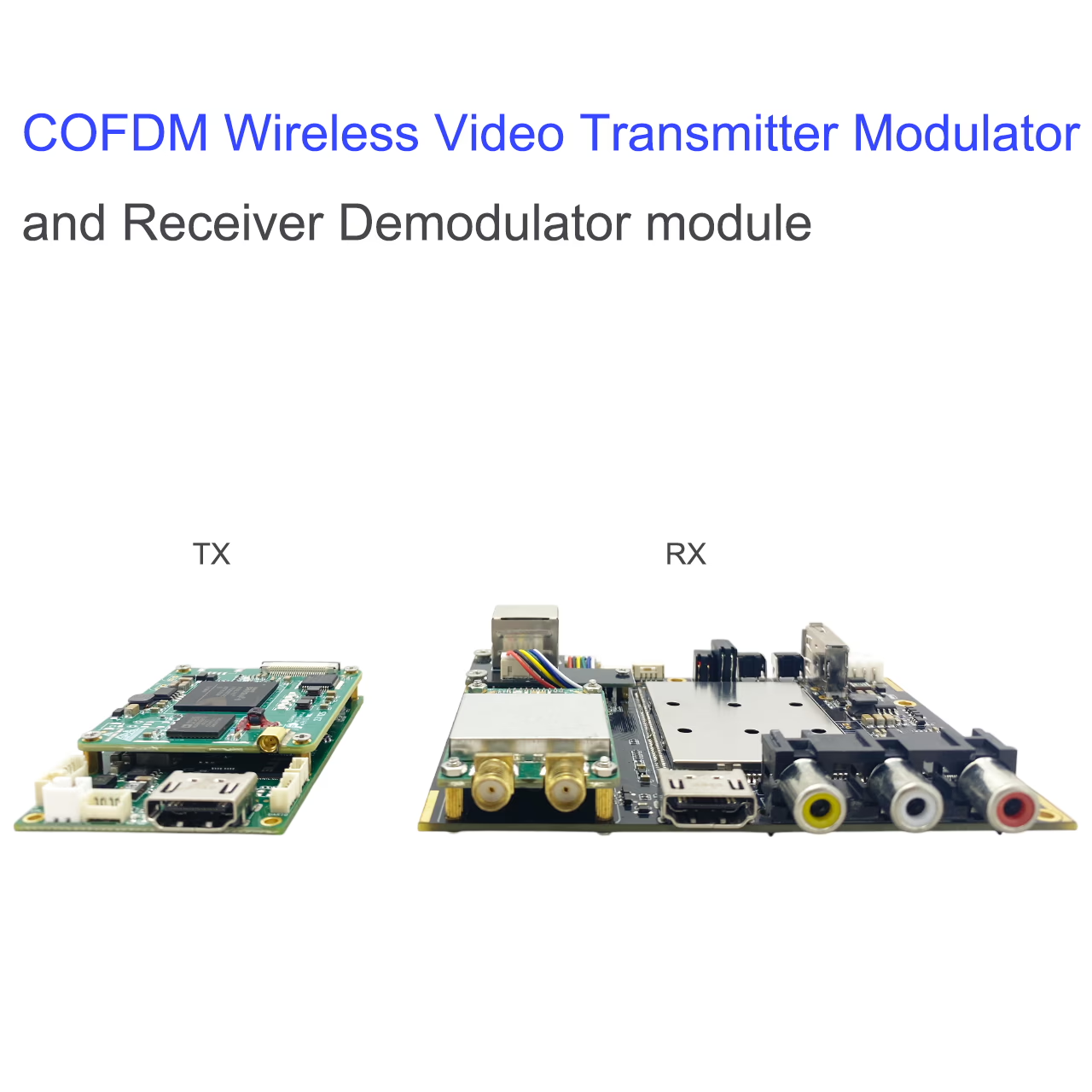
A3: We have another model, langaton videolähetin ja vastaanotin, COFDM-912T. You need to install another data radio telemetry to control the ground rover.










Noah –
This wireless video transmitter-receiver for our ground rover is an absolute game-changer! Ditching the cables has given us incredible freedom of movement and eliminated constant snagging hassles. The real-time video feed is impressively stable and low-latency, even at significant distances, letting us navigate complex terrain and inspect areas with total confidence. Setup was remarkably simple and quick. The robust connection holds up perfectly in our varied outdoor environments, making mission execution smoother, nopeampi, and far less stressful. A must-have upgrade for any serious rover operation – it transforms the entire user experience