Comment les liaisons bidirectionnelles TDD OFDM résolvent les problèmes de télémétrie à haut débit et de données de capteurs dans la communication par drone
Introduction
Drones modernes (Véhicules aériens sans pilote) exigent de plus en plus la transmission simultanée de plusieurs types de données : télémétrie, données de capteur ou vidéo à haut débit, et retour de commande/contrôle. Réaliser tout cela via une liaison sans fil fiable et à faible latence n'est pas une tâche triviale, surtout lorsqu'il s'agit d'applications en temps réel telles que la surveillance, cartographie, ou navigation autonome.
Un client a récemment présenté les exigences suivantes pour un système de communication par drone:
Résumé des exigences du client:
- Envoi de données de télémétrie à 40 ms (40Données de la Ko) sur un 100 Ligne Ethernet Mbps. Les données sont envoyées sous forme de paquets UDP.
- Envoi de données brutes de taille 1.7 Mo à 40 ms sur une 1 Ligne Ethernet Gbps utilisant le protocole UDP.
- Commande/réponse via RS422, pour interagir avec l'ordinateur de bord du drone pour obtenir des données IMU (emplacement et attitude) @40 ms, et interagissez également avec GCS sur RF.
Cet ensemble d'exigences met en évidence la complexité des besoins modernes en matière de transmission de données par les drones.: haut débit, faible latence, et interaction full-duplex entre l'air et le sol.
Défis dans la configuration d'origine
Analysons les exigences en termes techniques:
| Type de données | Intervalle | Taille des données | Débit de données équivalent | Type de communication |
|---|---|---|---|---|
| Télémétrie | 40 Mme | 40 Kb | ~8 Mbit/s | UDP (100 Ethernet Mbit/s) |
| Données brutes | 40 Mme | 1.7 MB | ~340 Mbit/s | UDP (1 Ethernet Gbit/s) |
| Commande / IMU | 40 Mme | <100 Kb | Négligeable | Liaison série RS422 |
Principaux défis:
- Déborder: 340 Les Mbps de données brutes dépassent ce que les systèmes COFDM ou à bande étroite traditionnels peuvent gérer.
- Directionnalité: Les données de télémétrie et IMU doivent circuler dans les deux sens entre le drone et le GCS.
- Synchronisation: Données, vidéo, et les liens de contrôle doivent être synchronisés à 25 Hz (40 période ms) sans perte de paquets ni latence élevée.
Cela montre clairement qu'un TDD (Duplex à répartition temporelle) Liaison bidirectionnelle basée sur OFDM est la solution idéale.
Pourquoi TDD OFDM est la bonne solution
1. Transmission bidirectionnelle dans un canal à fréquence unique
Contrairement aux émetteurs COFDM unidirectionnels traditionnels, une liaison TDD OFDM utilise la même bande de fréquences pour la liaison montante et la liaison descendante, tranches horaires de transmission alternées. Cela permet:
- Communication entièrement bidirectionnelle (commande, télémétrie, et des données)
- Complexité RF et exigences d'antenne réduites
- Synchronisation parfaite entre le drone et la station au sol
2. Utilisation efficace du spectre
Dans des environnements à bande étroite ou des systèmes de drones à fréquence limitée (Par exemple, 300 MHz–6 GHz), TDD OFDM permet une allocation adaptative des ratios de liaison montante/descendante:
- Par exemple, 80% liaison descendante pour les données de capteur/vidéo et 20% liaison montante pour télémétrie/commandes.
- La commutation dynamique basée sur l'état de la liaison garantit un débit optimal et un délai minimal.
3. Compatibilité UDP
Étant donné qu'UDP est léger et convivial en temps réel, le système TDD OFDM peut encapsuler les paquets UDP directement dans son mode pont Ethernet, assurer une transmission transparente des données pour la télémétrie et les données des capteurs.
4. Intégration avec RS422 / Contrôle série
Les modules TDD OFDM prennent souvent en charge les données série transparentes (RS232/422/485) canaux en parallèle avec le flux Ethernet. Cela permet:
- Echange commande/contrôle en temps réel avec l'ordinateur de bord
- Synchronisation des données IMU et GPS avec le logiciel de contrôle au sol
- Flux de données unifié combinant les interfaces Ethernet et série
5. Faible latence et stabilité
Avec un cadrage optimisé, Les systèmes TDD OFDM peuvent atteindre une latence de bout en bout inférieure à 40 à 50 ms, qui répond aux exigences du client 25 Taux de mise à jour de la télémétrie Hz.
En plus, le FEC robuste (Correction d'erreur vers l'avant) et la modulation adaptative maintiennent une transmission stable même dans des conditions de vol dynamiques.
Exemple de mise en œuvre du système
[Drone Onboard Unit]
├── Sensors / Camera (Raw Data 1.7 MB @40ms)
├── Flight Controller (Telemetry + IMU via RS422)
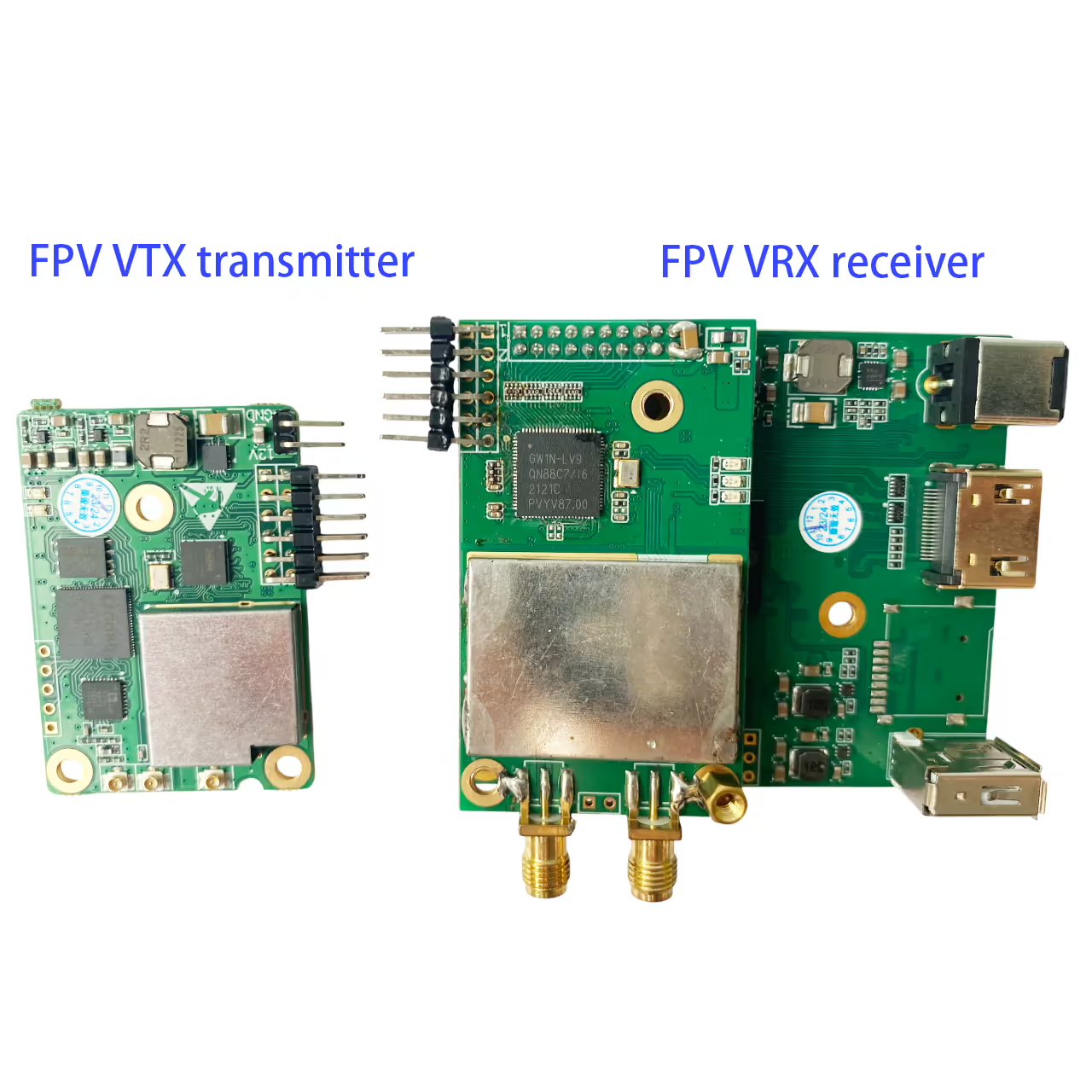
├── TDD OFDM Transceiver Module (Ethernet + Serial Input)
└── Power & Antenna System
⇅ (Bidirectional RF Link, e.g., 840 MHz / 1.4 GHz / 2.4 GHz)
[Ground Control Station]
├── TDD OFDM Receiver (Ethernet Output + RS422)
├── GCS Software (UDP-based Telemetry & Control)
└── Data Storage / Video Processing System
Cette configuration permet un pont de données en duplex intégral entre le drone et le sol – vidéo, télémétrie, et les signaux de contrôle série circulent tous de manière transparente via la même liaison radio TDD OFDM.
Avantages des liaisons bidirectionnelles TDD OFDM
| Fonctionnalité | Avantage |
|---|---|
| Fréquence unique pour TX/RX | Simplifie la configuration de l'antenne et l'octroi de licences de spectre |
| Ratio de créneaux horaires réglable | Personnalisable pour l'équilibre de la bande passante des liaisons montantes et descendantes |
| UDP transparent / Prise en charge Ethernet | Directement compatible avec les systèmes IP existants |
| Port série intégré | Idéal pour les échanges de commande/contrôle et de télémétrie |
| Faible latence | <50 ms délai de bout en bout |
| Forte anti-interférence | La modulation OFDM et FEC garantissent des performances stables |
Conclusion
La configuration exigeante du client, combinant télémétrie, données brutes, et contrôle RS422—illustre pourquoi les systèmes de drones modernes nécessitent des adaptations, solutions de données en duplex intégral.
UNE Liaison bidirectionnelle TDD OFDM fournit:
- En temps réel, communication Ethernet et série bidirectionnelle
- Débit évolutif pour les données compressées et brutes
- Synchronisation fiable à 40 ms intervalles de mise à jour
En déployant un système TDD OFDM, Les concepteurs de drones peuvent atteindre l'équilibre parfait entre débit, latence, et fiabilité, ce qui en fait l'épine dorsale des réseaux de communication de drones de nouvelle génération.
FAQ
Q1: Un lien TDD OFDM peut-il gérer à la fois la vidéo et la télémétrie?
Oui. Le système prend en charge le pontage Ethernet, permettant plusieurs flux de données – vidéo, télémétrie, et contrôle - à multiplexer simultanément.
Q2: Quelle est la latence typique d'un lien TDD OFDM?
Selon la configuration et la modulation, la latence du système est généralement 30–50 ms, adapté au contrôle en temps réel des drones et à la transmission vidéo HD.
Q3: En quoi diffère-t-il d'un émetteur COFDM traditionnel?
Les systèmes COFDM traditionnels sont Sens Unique (Émission uniquement), tandis que TDD OFDM est bidirectionnel, prenant en charge les canaux de données et de commande dans une seule bande de fréquence.
Q4: Est 1.7 Mo à 40 ms réalisable sur RF?
Pas directement. Le débit de données non compressées (340 mbps) est trop élevé pour les liaisons COFDM ou TDD OFDM typiques. La solution est de compresser, sous-échantillonner, ou transmettre sélectivement des parties de données critiques.
Q5: Quelles interfaces sont prises en charge?
Les modules TDD OFDM incluent généralement:
le port série paramétrable (10/100/1000 mbps) pour les communications UDP/TCP/IP
Port série (RS232/422/485) pour échange de commande ou de télémétrie
GPIO ou CAN (optionnel) pour le contrôle d'appareils externes




Liaison de données vidéo de drone
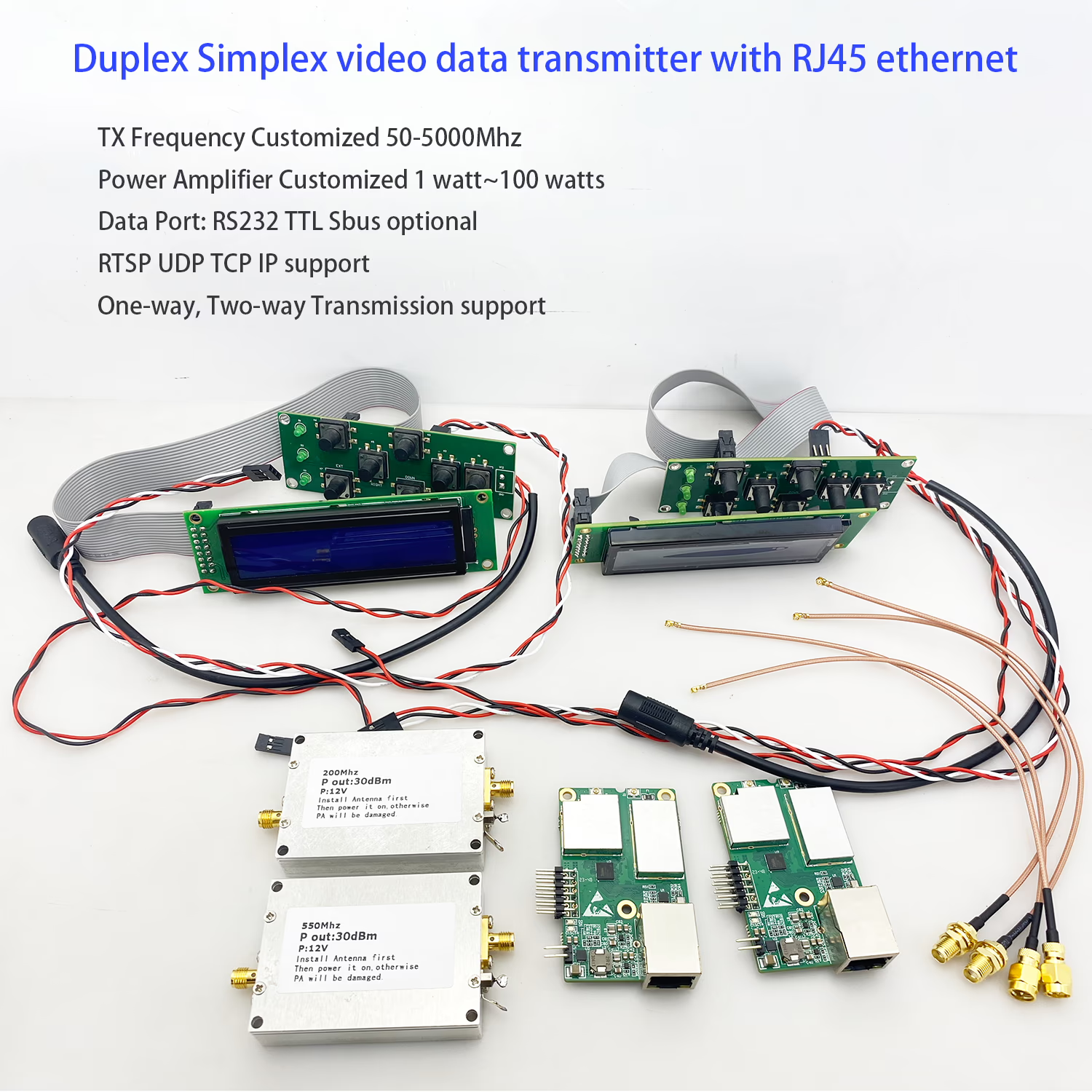
VTX pour drone liaison de données vidéo émetteur récepteur longue portée 30-50km 2X1.6WPA

Encodeur HDMI vers ISDB-T RF


Liaison de données vidéo de drone
Module de liaison de radio DIY UAV Drone Video Radio IP TTL SBUS

Liaison de données vidéo de drone

Liaison de données vidéo de drone
Poser une question
Merci pour votre réponse. ✨