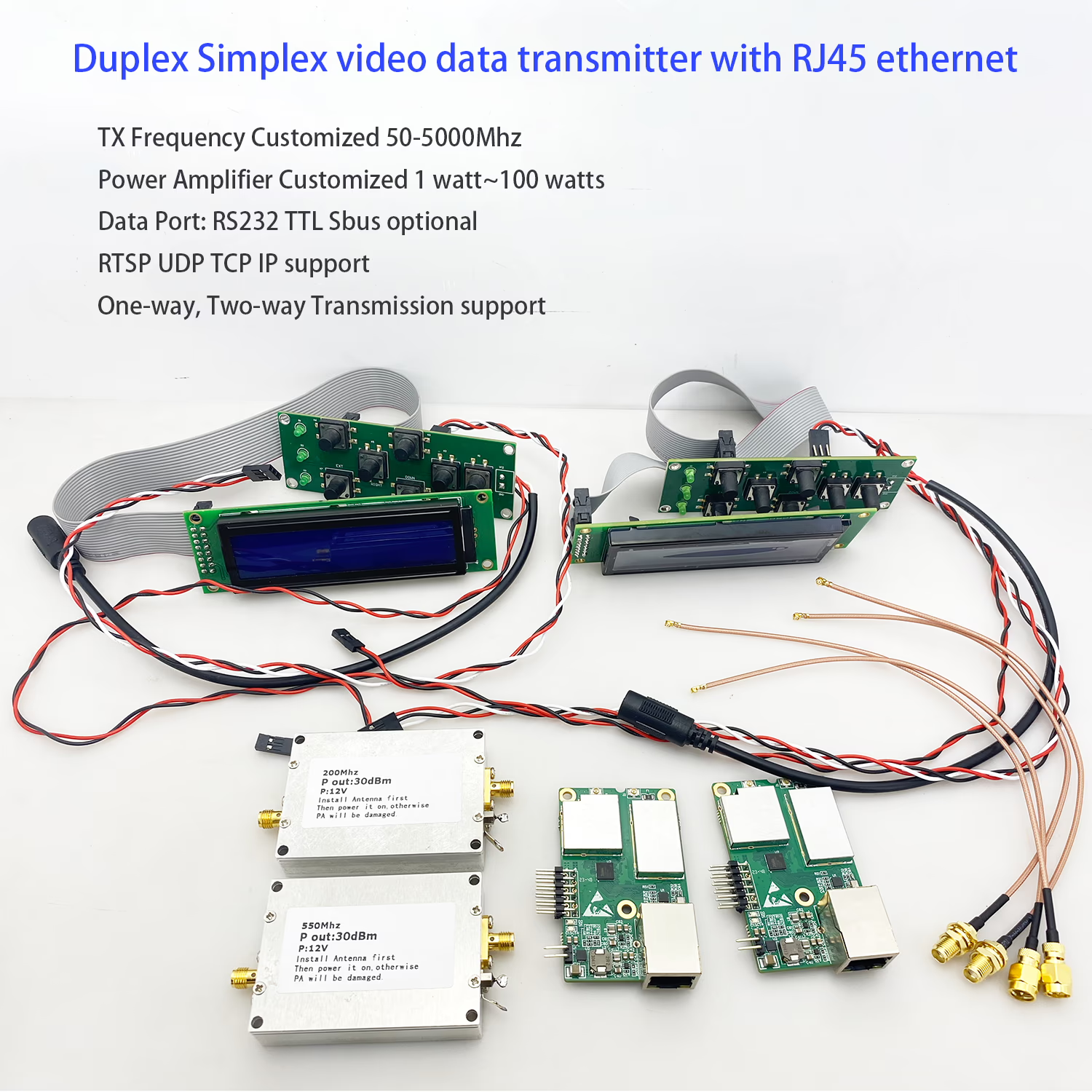
ลิงก์แบบสองทิศทาง TDD OFDM แก้ปัญหาการวัดและส่งข้อมูลทางไกลความเร็วสูงและข้อมูลเซ็นเซอร์ในการสื่อสารด้วยโดรนได้อย่างไร
การแนะนำ
UAV สมัยใหม่ (อากาศยานไร้คนขับ) มีความต้องการการส่งข้อมูลหลายประเภทพร้อมกันมากขึ้น—การตรวจวัดทางไกล, เซ็นเซอร์หรือข้อมูลวิดีโออัตราสูง, และการตอบสนองคำสั่ง/การควบคุม. การบรรลุสิ่งเหล่านี้ทั้งหมดผ่านลิงก์ไร้สายที่เชื่อถือได้และมีเวลาแฝงต่ำไม่ใช่เรื่องเล็กน้อย, โดยเฉพาะอย่างยิ่งเมื่อต้องรับมือกับแอปพลิเคชันแบบเรียลไทม์ เช่น การเฝ้าระวัง, การทำแผนที่, หรือการนำทางอัตโนมัติ.
ลูกค้ารายหนึ่งได้นำเสนอข้อกำหนดต่อไปนี้สำหรับระบบสื่อสารด้วยโดรน:
สรุปความต้องการของลูกค้า:
- กำลังส่งข้อมูลการวัดและส่งข้อมูลทางไกล @40ms (40ข้อมูลกิโลไบต์) มากกว่า 100 สายอีเธอร์เน็ต Mbps. ข้อมูลจะถูกส่งเป็นแพ็กเก็ต UDP.
- ส่งข้อมูลดิบขนาด 1.7 MB @40ms เหนือ a 1 สายอีเธอร์เน็ต Gbps โดยใช้โปรโตคอล UDP.
- คำสั่ง/ตอบสนองผ่าน RS422, เพื่อโต้ตอบกับคอมพิวเตอร์ออนบอร์ดของโดรนเพื่อรับข้อมูล IMU (สถานที่และทัศนคติ) @40ms, และยังโต้ตอบกับ GCS ผ่าน RF อีกด้วย.
ข้อกำหนดชุดนี้เน้นย้ำถึงความซับซ้อนของความต้องการในการส่งข้อมูล UAV สมัยใหม่: ปริมาณงานสูง, เวลาแฝงต่ำ, และปฏิสัมพันธ์ฟูลดูเพล็กซ์ระหว่างอากาศและพื้นดิน.
ความท้าทายในการตั้งค่าดั้งเดิม
มาวิเคราะห์ข้อกำหนดในแง่เทคนิคกันดีกว่า:
| ประเภทข้อมูล | ช่วงเวลา | ขนาดข้อมูล | อัตราข้อมูลที่เท่ากัน | ประเภทการสื่อสาร |
|---|---|---|---|---|
| การวัดและส่งข้อมูลทางไกล | 40 นางสาว | 40 KB | ~8Mbps | UDP (100 Mbps อีเทอร์เน็ต) |
| ข้อมูลดิบ | 40 นางสาว | 1.7 MB | ~340เมกะบิตต่อวินาที | UDP (1 Gbps อีเทอร์เน็ต) |
| สั่งการ / ไอมู | 40 นางสาว | <100 KB | เล็กน้อย | ลิงค์อนุกรม RS422 |
ความท้าทายที่สำคัญ:
- ปริมาณงาน: 340 ข้อมูลดิบ Mbps เกินกว่าที่ COFDM หรือระบบแนร์โรว์แบนด์แบบเดิมสามารถจัดการได้.
- ทิศทาง: ข้อมูลการวัดและส่งข้อมูลทางไกลและ IMU จะต้องไหลทั้งสองทิศทางระหว่างโดรนและ GCS.
- การซิงโครไนซ์: ข้อมูล, วีดีโอ, และลิงค์ควบคุมจะต้องซิงโครไนซ์ที่ 25 เฮิร์ตซ์ (40 มิลลิวินาที) โดยไม่มีการสูญเสียแพ็กเก็ตหรือเวลาแฝงสูง.
เรื่องนี้ทำให้เห็นได้ชัดเจนว่าก TDD (ดูเพล็กซ์การแบ่งเวลา) ลิงก์แบบสองทิศทางที่ใช้ OFDM เป็นทางออกที่ดี.
เหตุใด TDD OFDM จึงเป็นโซลูชั่นที่เหมาะสม
1. การส่งสัญญาณแบบสองทิศทางในช่องความถี่เดียว
แตกต่างจากเครื่องส่งสัญญาณ COFDM แบบทิศทางเดียวแบบดั้งเดิม, ลิงค์ TDD OFDM ใช้ย่านความถี่เดียวกันสำหรับทั้งอัปลิงค์และดาวน์ลิงค์, ช่วงเวลาการส่งข้อมูลสลับกัน. สิ่งนี้ช่วยให้:
- การสื่อสารแบบสองทิศทางเต็มรูปแบบ (สั่งการ, การวัดและส่งข้อมูลทางไกล, และข้อมูล)
- ลดความซับซ้อนของ RF และข้อกำหนดเสาอากาศ
- การซิงโครไนซ์ที่สมบูรณ์แบบระหว่างโดรนและสถานีภาคพื้นดิน
2. การใช้สเปกตรัมอย่างมีประสิทธิภาพ
ในสภาพแวดล้อมย่านความถี่แคบหรือระบบ UAV ที่จำกัดความถี่ (เช่น, 300 เมกะเฮิรตซ์–6 กิกะเฮิร์ตซ์), TDD OFDM ช่วยให้สามารถจัดสรรอัตราส่วนอัปลิงก์/ดาวน์ลิงก์แบบปรับได้:
- ตัวอย่างเช่น, 80% ดาวน์ลิงค์ สำหรับข้อมูลเซ็นเซอร์/วิดีโอ และ 20% อัปลิงค์ สำหรับการวัดและส่งข้อมูลทางไกล/คำสั่ง.
- การสลับแบบไดนามิกตามเงื่อนไขของลิงก์ช่วยให้มั่นใจได้ถึงปริมาณงานที่เหมาะสมและความล่าช้าน้อยที่สุด.
3. ความเข้ากันได้ของ UDP
เนื่องจาก UDP มีน้ำหนักเบาและเป็นมิตรแบบเรียลไทม์, ระบบ TDD OFDM สามารถห่อหุ้มแพ็กเก็ต UDP ได้โดยตรงในโหมดอีเธอร์เน็ตบริดจ์, ช่วยให้มั่นใจได้ถึงการส่งข้อมูลที่โปร่งใสสำหรับทั้งการวัดและส่งข้อมูลทางไกลและข้อมูลเซ็นเซอร์.
4. บูรณาการกับ RS422 / การควบคุมแบบอนุกรม
โมดูล TDD OFDM มักจะรองรับข้อมูลอนุกรมแบบโปร่งใส (RS232/422/485) ช่องสัญญาณขนานกับสตรีมอีเธอร์เน็ต. สิ่งนี้ช่วยให้:
- การแลกเปลี่ยนคำสั่ง/การควบคุมแบบเรียลไทม์กับคอมพิวเตอร์ออนบอร์ด
- การซิงโครไนซ์ข้อมูล IMU และ GPS กับซอฟต์แวร์ควบคุมภาคพื้นดิน
- สตรีมข้อมูลแบบรวมที่รวมอีเทอร์เน็ตและอินเทอร์เฟซแบบอนุกรม
5. เวลาแฝงและความเสถียรต่ำ
ด้วยการจัดเฟรมที่ปรับให้เหมาะสม, ระบบ TDD OFDM สามารถบรรลุเวลาแฝงตั้งแต่ต้นทางถึงปลายทางภายใต้ 40–50 ms, ซึ่งตรงตามความต้องการของลูกค้าของ 25 อัตราการอัปเดตการวัดและส่งข้อมูลทางไกล Hz.
นอกจากนี้, FEC ที่แข็งแกร่ง (แก้ไขข้อผิดพลาดไปข้างหน้า) และการมอดูเลตแบบปรับได้ช่วยรักษาการส่งสัญญาณที่เสถียรแม้ภายใต้สภาวะการบินแบบไดนามิก.
ตัวอย่างการนำระบบไปใช้
[Drone Onboard Unit]
├── Sensors / Camera (Raw Data 1.7 MB @40ms)
├── Flight Controller (Telemetry + IMU via RS422)
├── TDD OFDM Transceiver Module (Ethernet + Serial Input)
└── Power & Antenna System
⇅ (Bidirectional RF Link, e.g., 840 MHz / 1.4 GHz / 2.4 GHz)
[Ground Control Station]
├── TDD OFDM Receiver (Ethernet Output + RS422)
├── GCS Software (UDP-based Telemetry & Control)
└── Data Storage / Video Processing System
การกำหนดค่านี้ช่วยให้สามารถ สะพานข้อมูลฟูลดูเพล็กซ์ ระหว่างโดรนกับพื้น—วิดีโอ, การวัดและส่งข้อมูลทางไกล, และสัญญาณควบคุมแบบอนุกรมทั้งหมดไหลได้อย่างราบรื่นผ่านลิงค์วิทยุ TDD OFDM เดียวกัน.
ข้อดีของการเชื่อมโยงแบบสองทิศทาง TDD OFDM
| ลักษณะเฉพาะ | ผลประโยชน์ |
|---|---|
| ความถี่เดียวสำหรับ TX/RX | ลดความยุ่งยากในการตั้งค่าเสาอากาศและการออกใบอนุญาตคลื่นความถี่ |
| อัตราส่วนช่องเวลาที่ปรับได้ | ปรับแต่งแบนด์วิดท์อัปลิงค์/ดาวน์ลิงค์ได้ |
| UDP โปร่งใส / รองรับอีเธอร์เน็ต | เข้ากันได้โดยตรงกับระบบที่ใช้ IP ที่มีอยู่ |
| พอร์ตอนุกรมแบบรวม | เหมาะสำหรับการแลกเปลี่ยนคำสั่ง/การควบคุมและการวัดและส่งข้อมูลทางไกล |
| เวลาแฝงต่ำ | <50 ms ความล่าช้าจากต้นทางถึงปลายทาง |
| ป้องกันการรบกวนที่แข็งแกร่ง | การปรับ OFDM และ FEC ช่วยให้มั่นใจถึงประสิทธิภาพที่มั่นคง |
บทสรุป
การตั้งค่าที่ลูกค้าต้องการ—การรวมการวัดและส่งข้อมูลทางไกล, ข้อมูลดิบ, และการควบคุม RS422—อธิบายเหตุผล ระบบ UAV สมัยใหม่จำเป็นต้องมีการปรับตัว, โซลูชันข้อมูลฟูลดูเพล็กซ์.
ก ลิงค์แบบสองทิศทาง TDD OFDM จัดเตรียมให้:
- เรียลไทม์, อีเธอร์เน็ตสองทางและการสื่อสารแบบอนุกรม
- ปริมาณงานที่ปรับขนาดได้สำหรับทั้งข้อมูลที่ถูกบีบอัดและข้อมูลดิบ
- การซิงโครไนซ์ที่เชื่อถือได้ที่ 40 ms ช่วงเวลาการอัพเดต
ด้วยการปรับใช้ระบบ TDD OFDM, นักออกแบบ UAV สามารถบรรลุความสมดุลที่สมบูรณ์แบบของ ปริมาณงาน, เวลาแฝง, และความน่าเชื่อถือ, ทำให้เป็นแกนหลักของเครือข่ายการสื่อสารด้วยโดรนเจเนอเรชั่นใหม่.
คำถามที่พบบ่อย
คำถามที่ 1: ลิงก์ TDD OFDM สามารถจัดการทั้งวิดีโอและการวัดและส่งข้อมูลทางไกลในเวลาเดียวกันได้?
ใช่. ระบบรองรับการเชื่อมต่ออีเทอร์เน็ต, อนุญาตให้สตรีมข้อมูลหลายรายการ - วิดีโอ, การวัดและส่งข้อมูลทางไกล, และการควบคุม—เพื่อมัลติเพล็กซ์พร้อมกัน.
คำถามที่ 2: เวลาแฝงโดยทั่วไปของลิงก์ TDD OFDM คือเท่าใด?
ขึ้นอยู่กับการกำหนดค่าและการมอดูเลต, โดยทั่วไปเวลาแฝงของระบบคือ 30–50 มิลลิวินาที, เหมาะสำหรับการควบคุมแบบเรียลไทม์ UAV และการส่งสัญญาณวิดีโอ HD.
ไตรมาสที่ 3: มันแตกต่างจากเครื่องส่งสัญญาณ COFDM แบบดั้งเดิมอย่างไร?
ระบบ COFDM แบบดั้งเดิมคือ ทางเดียว (เท็กซัสเท่านั้น), ในขณะที่ TDD OFDM เป็น แบบสองทิศทาง, รองรับทั้งข้อมูลและช่องคำสั่งในย่านความถี่เดียว.
ไตรมาสที่ 4: เป็น 1.7 MB @40ms เป็นไปได้ผ่าน RF?
ไม่ใช่โดยตรง. อัตราข้อมูลที่ไม่มีการบีบอัด (340 Mbps) สูงเกินไปสำหรับลิงก์ COFDM หรือ TDD OFDM ทั่วไป. วิธีแก้ไขคือการบีบอัด, ตัวอย่างดาวน์, หรือเลือกส่งส่วนข้อมูลที่สำคัญ.
คำถามที่ 5: รองรับอินเทอร์เฟซใดบ้าง?
โดยทั่วไปแล้วโมดูล TDD OFDM จะประกอบด้วย:
อีเทอร์เน็ต (10/100/1000 Mbps) สำหรับการสื่อสาร UDP/TCP/IP
พอร์ตอนุกรม (RS232/422/485) สำหรับการแลกเปลี่ยนคำสั่งหรือการวัดทางไกล
GPIO หรือ CAN (ไม่จำเป็น) สำหรับการควบคุมอุปกรณ์ภายนอก




ลิงค์ข้อมูลวิดีโอโดรน
VTX สำหรับเครื่องรับส่งสัญญาณระยะไกลลิงค์ข้อมูลวิดีโอโดรน 30-50 กม. 2X1.6WPA

ตัวเข้ารหัส HDMI เป็น ISDB-T RF


ลิงค์ข้อมูลวิดีโอโดรน

ลิงค์ข้อมูลวิดีโอโดรน

ลิงค์ข้อมูลวิดีโอโดรน
ถามคำถาม
ข้อความของคุณถูกส่งไปแล้ว