TDD OFDM 双方向リンクがドローン通信における高速テレメトリとセンサー データの課題をどのように解決するか
導入
最新の無人航空機 (無人航空機) 複数のデータタイプの同時送信の需要がますます高まっている - テレメトリ, 高速センサーまたはビデオ データ, コマンド/コントロールフィードバック. 信頼性が高く遅延の少ないワイヤレス リンクを介してこれらすべてを実現するのは簡単な作業ではありません, 特に監視などのリアルタイム アプリケーションを扱う場合, マッピング, または自律航行.
最近、顧客はドローン通信システムに対して次の要件を提示しました。:
顧客の要件の概要:
- テレメトリ データを 40 ミリ秒で送信 (40KBデータ) を超えて 100 Mbpsイーサネット回線. データは UDP パケットとして送信されます.
- サイズの生データを送信する 1.7 MB @40ms 以上 1 UDPプロトコルを使用したGbpsイーサネット回線.
- RS422経由のコマンド/レスポンス, ドローンの搭載コンピューターと通信して IMU データを取得する (場所と態度) @40ms, RF 経由で GCS とも対話します.
この一連の要件は、現代の UAV データ送信ニーズの複雑さを浮き彫りにしています。: 高スループット, 低遅延, 空と地上の間の全二重通信.
元のセットアップでの課題
要件を技術用語で分析しましょう:
| データ型 | 間隔 | データサイズ | 同等のデータレート | 通信タイプ |
|---|---|---|---|---|
| テレメトリー | 40 MS | 40 KB | ~8Mbps | UDP (100 Mbpsイーサネット) |
| 生データ | 40 MS | 1.7 MB | ~340Mbps | UDP (1 Gbpsイーサネット) |
| 指示 / IMU | 40 MS | <100 KB | 無視できる | RS422シリアルリンク |
主要な課題:
- スループット: 340 生データの Mbps は、従来の COFDM または狭帯域システムが処理できる量を超えています.
- 方向性: テレメトリと IMU データはドローンと GCS の間で両方向に流れる必要があります.
- 同期: データ, ビデオ, 制御リンクは次の時点で同期する必要があります。 25 Hz (40 ミリ秒周期) パケット損失や高い遅延が発生しない.
これにより、 TDD (時分割二重通信) OFDMベースの双方向リンク 理想的な解決策です.
TDD OFDM が適切なソリューションである理由
1. 単一周波数チャネルでの双方向伝送
従来の単方向 COFDM トランスミッターとは異なります。, TDD OFDM リンクは、アップリンクとダウンリンクの両方に同じ周波数帯域を使用します。, 交互送信タイムスロット. これにより、:
- 完全な双方向通信 (指示, テレメトリー, そしてデータ)
- RF の複雑さとアンテナ要件の軽減
- ドローンと地上局間の完璧な同期
2. スペクトルの効率的な利用
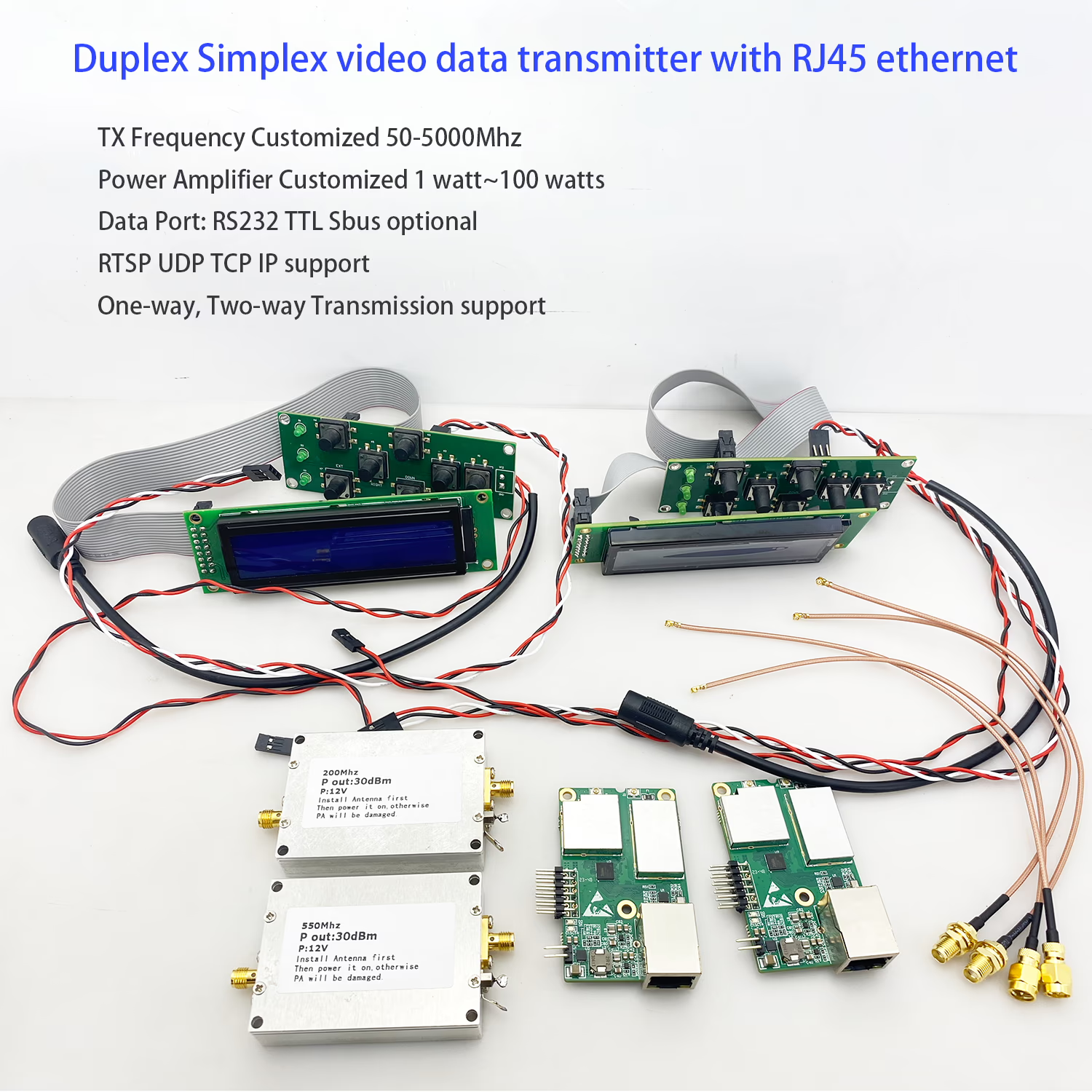
狭帯域環境または周波数に制約のある UAV システムの場合 (例えば。, 300 MHz~6GHz), TDD OFDM により、アップリンク/ダウンリンク比率の適応的な割り当てが可能になります:
- 例えば, 80% ダウンリンク センサー/ビデオデータ用と 20% アップリンク テレメトリ/コマンド用.
- リンク状態に基づいた動的なスイッチングにより、最適なスループットと最小限の遅延が保証されます。.
3. UDP の互換性
UDP は軽量でリアルタイム性に優れているため、, TDD OFDM システムは、イーサネット ブリッジ モードで UDP パケットを直接カプセル化できます。, テレメトリーデータとセンサーデータの両方の透過的なデータ送信を保証する.
4. RS422との統合 / シリアル制御
TDD OFDM モジュールは多くの場合、透過シリアル データをサポートします (RS232/422/485) イーサネットストリームと並行したチャネル. これにより、:
- オンボードコンピュータとのリアルタイムのコマンド/制御交換
- IMUおよびGPSデータと地上制御ソフトウェアの同期
- イーサネットとシリアルインターフェイスを組み合わせた統合データストリーム
5. 低遅延と安定性
最適化されたフレームにより, TDD OFDM システムは、エンドツーエンドの遅延を 40 ~ 50 ミリ秒未満に達成できます。, という顧客の要求を満たします 25 Hz テレメトリ更新レート.
さらに, 堅牢な FEC (フォワードエラー修正) 適応変調により、動的な飛行条件下でも安定した伝送が維持されます。.
システム導入例
[Drone Onboard Unit]
├── Sensors / Camera (Raw Data 1.7 MB @40ms)
├── Flight Controller (Telemetry + IMU via RS422)
├── TDD OFDM Transceiver Module (Ethernet + Serial Input)
└── Power & Antenna System
⇅ (Bidirectional RF Link, e.g., 840 MHz / 1.4 GHz / 2.4 GHz)
[Ground Control Station]
├── TDD OFDM Receiver (Ethernet Output + RS422)
├── GCS Software (UDP-based Telemetry & Control)
└── Data Storage / Video Processing System
この構成により、 全二重データブリッジ ドローンと地面の間 - ビデオ, テレメトリー, およびシリアル制御信号はすべて、同じ TDD OFDM 無線リンクを介してシームレスに流れます。.
TDD OFDM 双方向リンクの利点
| 特徴 | 利点 |
|---|---|
| 単一周波数のTX/RX | アンテナのセットアップとスペクトルのライセンス発行を簡素化します |
| 調整可能なタイムスロット比率 | アップリンク/ダウンリンクの帯域幅バランスをカスタマイズ可能 |
| 透過的な UDP / イーサネットのサポート | 既存のIPベースのシステムと直接互換性があります |
| 統合シリアルポート | コマンド/コントロールおよびテレメトリ交換に最適 |
| 低遅延 | <50 ミリ秒のエンドツーエンド遅延 |
| 強力な耐干渉性 | OFDM変調とFECにより安定したパフォーマンスを保証 |
結論
お客様の要求の厳しいセットアップ - テレメトリの組み合わせ, 生データ, および RS422 制御 - その理由を説明します 最新の UAV システムには適応性が必要です, 全二重データ ソリューション.
あ TDD OFDM双方向リンク 提供します:
- リアルタイム, 双方向イーサネットおよびシリアル通信
- 圧縮データと生データの両方に対するスケーラブルなスループット
- 信頼性の高い同期 40 ミリ秒の更新間隔
TDD OFDMシステムを導入することで, UAV 設計者は、以下の完璧なバランスを達成できます。 スループット, レイテンシ, そして信頼性, 次世代ドローン通信ネットワークのバックボーンとなる.
よくある質問
Q1: TDD OFDM リンクはビデオとテレメトリの両方を同時に処理できますか?
はい. システムはイーサネットブリッジングをサポートしています, 複数のデータ ストリームの許可 - ビデオ, テレメトリー, と制御 - 同時に多重化される.
Q2: TDD OFDM リンクの一般的な遅延はどれくらいですか?
構成と変調に応じて, システムの遅延は通常、 30–50ミリ秒, UAVリアルタイム制御やHDビデオ伝送に最適.
Q3: 従来の COFDM トランスミッターとの違いは何ですか?
従来の COFDM システムは、 一方通行 (TXのみ), TDD OFDMは 双方向, 1 つの周波数帯域でデータ チャネルとコマンド チャネルの両方をサポート.
Q4: は 1.7 MB @40ms が RF 上で実現可能?
直接ではありません. 非圧縮データレート (340 Mbpsの) 一般的な COFDM または TDD OFDM リンクには高すぎます. 解決策は圧縮することです, ダウンサンプル, または重要なデータ部分を選択的に送信する.
Q5: サポートされているインターフェイス?
TDD OFDM モジュールには通常、次のものが含まれます。:
イーサネット (10/100/1000 Mbpsの) UDP/TCP/IP通信用
シリアルポート (RS232/422/485) コマンドまたはテレメトリ交換用
GPIO または CAN (オプション) 外部機器制御用



COFDM

ドローンビデオデータリンク

HDMIエンコーダからISDB-T RFへ
ビデオ UVC を IP RTSP に変換, アナログ CVBS HDMI AHD SDI ビデオ入力, イーサネット RTSP UDP ビデオ エンコーダ デコーダ


ドローンビデオデータリンク

ドローンビデオデータリンク

ドローンビデオデータリンク
質問する
ご回答をありがとうございました。 ✨