TDD OFDM 雙向鏈路如何解決無人機通信中的高速遙測和傳感器數據挑戰
介紹
現代無人機 (無人機) 多種數據類型同時傳輸的需求日益增長——遙測, 高速傳感器或視頻數據, 和命令/控制反饋. 通過可靠且低延遲的無線鏈路實現所有這些並不是一項簡單的任務, 尤其是在處理實時應用(例如監控)時, 映射, 或自主導航.
最近,一位客戶對無人機通信系統提出了以下要求:
客戶需求摘要:
- 發送遙測數據 @40ms (40知識庫數據) 超過一個 100 Mbps以太網線. 數據作為 UDP 數據包發送.
- 發送大小的原始數據 1.7 MB @40ms 超過 1 使用 UDP 協議的 Gbps 以太網線路.
- 通過 RS422 發送命令/響應, 與無人機的機載計算機交互以獲取 IMU 數據 (位置和態度) @40毫秒, 並通過 RF 與 GCS 交互.
這組需求凸顯了現代無人機數據傳輸需求的複雜性: 高通量, 輕的, 以及空中和地面之間的全雙工交互.
原始設置中的挑戰
讓我們從技術角度分析一下需求:
| 數據類型 | 間隔 | 數據大小 | 等效數據速率 | 通訊類型 |
|---|---|---|---|---|
| 遙測 | 40 多發性硬化症 | 40 知識庫 | 〜8 Mbps | UDP協議 (100 Mbps以太網) |
| 原始數據 | 40 多發性硬化症 | 1.7 兆字節 | 〜340 Mbps | UDP協議 (1 千兆位以太網) |
| 命令 / 慣性測量單元 | 40 多發性硬化症 | <100 知識庫 | 微不足道 | RS422串行鏈路 |
主要挑戰:
- 吞吐量: 340 Mbps 的原始數據超出了傳統 COFDM 或窄帶系統的處理能力.
- 方向性: 遙測和 IMU 數據必須在無人機和 GCS 之間雙向流動.
- 同步化: 數據, 視頻, 和控制鏈路需要同步 25 赫茲 (40 女士周期) 無丟包或高延遲.
這表明,一個 TDD (時分雙工) 基於 OFDM 的雙向鏈路 是理想的解決方案.
為什麼 TDD OFDM 是正確的解決方案
1. 單頻通道雙向傳輸
與傳統的單向 COFDM 發射機不同, TDD OFDM 鏈路上行鏈路和下行鏈路使用相同的頻段, 交替傳輸時隙. 這允許:
- 完全雙向通信 (命令, 遙測, 和數據)
- 降低射頻複雜性和天線要求
- 無人機與地面站完美同步
2. 高效頻譜利用
在窄帶環境或頻率受限的無人機系統中 (例如。, 300 MHz–6 GHz), TDD OFDM 允許自適應分配上行鏈路/下行鏈路比率:
- 例如, 80% 下行鏈路 用於傳感器/視頻數據和 20% 上行鏈路 用於遙測/命令.
- 基於鏈路狀況的動態切換確保最佳吞吐量和最小延遲.
3. UDP 兼容性
由於 UDP 是輕量級且實時友好的, TDD OFDM系統可以在其以太網橋接模式下直接封裝UDP數據包, 確保遙測和傳感器數據的透明數據傳輸.
4. 與 RS422 集成 / 串行控制
TDD OFDM 模塊通常支持透明串行數據 (RS232/422/485) 與以太網流並行的通道. 這允許:
- 與機載計算機實時命令/控制交換
- IMU和GPS數據與地面控制軟件同步
- 結合以太網和串行接口的統一數據流
5. 低延遲和穩定性
通過優化的框架, TDD OFDM系統可實現40-50毫秒以下的端到端延遲, 滿足客戶的要求 25 Hz 遙測更新率.
另外, 強大的FEC (正向誤差校正) 即使在動態飛行條件下,自適應調製也能保持穩定的傳輸.
系統實現實例
[Drone Onboard Unit]
├── Sensors / Camera (Raw Data 1.7 MB @40ms)
├── Flight Controller (Telemetry + IMU via RS422)
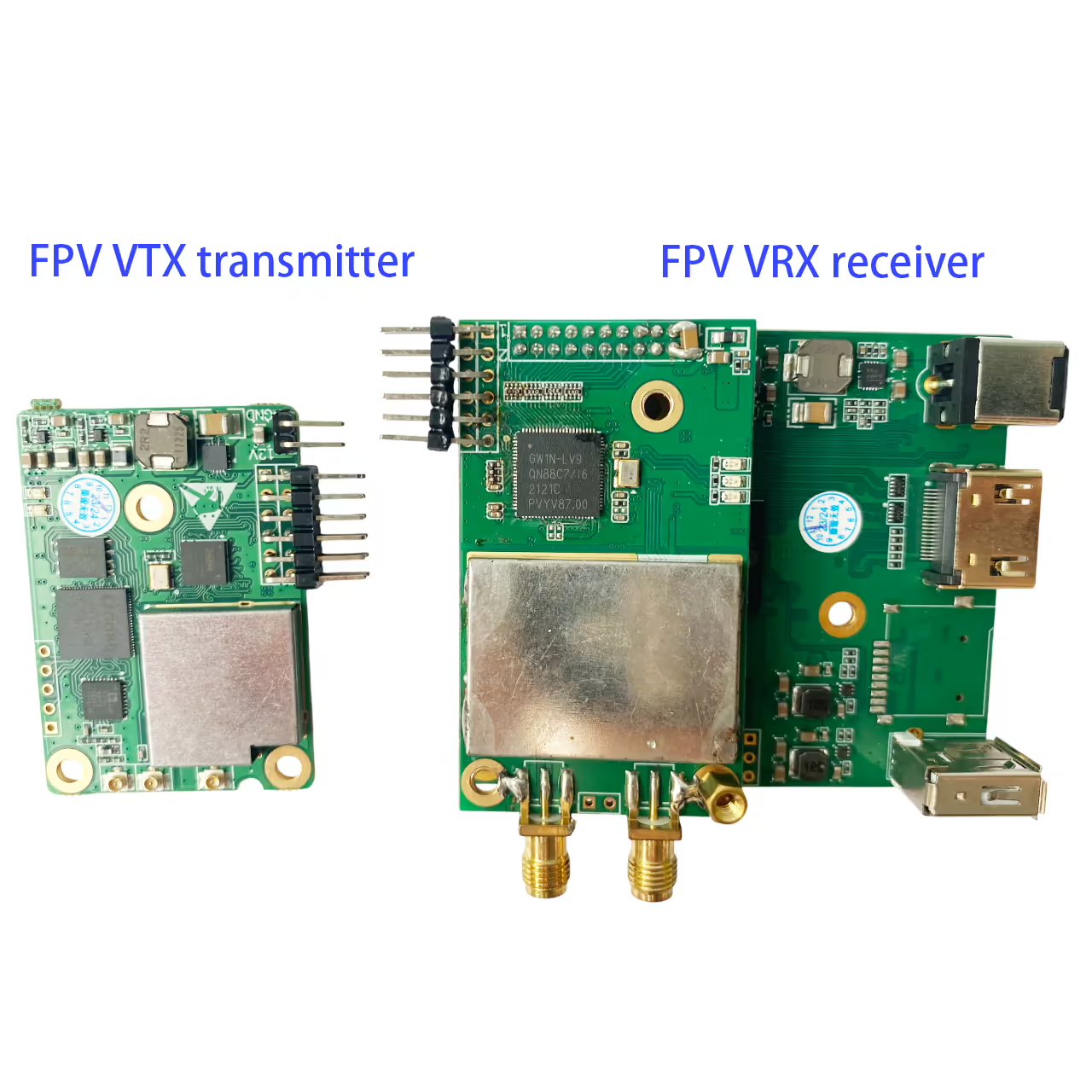
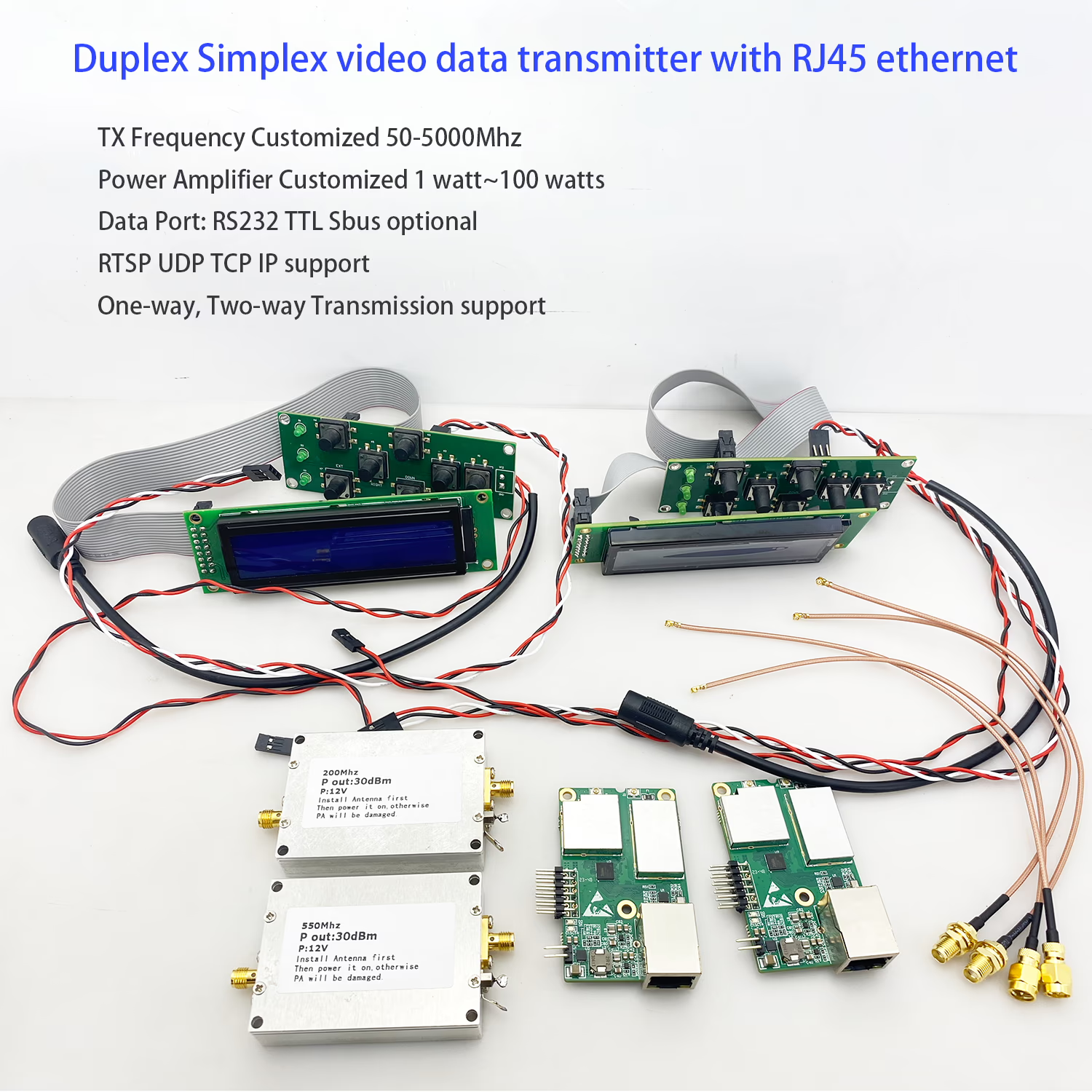
├── TDD OFDM Transceiver Module (Ethernet + Serial Input)
└── Power & Antenna System
⇅ (Bidirectional RF Link, e.g., 840 MHz / 1.4 GHz / 2.4 GHz)
[Ground Control Station]
├── TDD OFDM Receiver (Ethernet Output + RS422)
├── GCS Software (UDP-based Telemetry & Control)
└── Data Storage / Video Processing System
此配置使 全雙工數據橋 無人機與地面之間——視頻, 遙測, 和串行控制信號都通過同一個 TDD OFDM 無線電鏈路無縫流動.
TDD OFDM 雙向鏈路的優點
| 特徵 | 益處 |
|---|---|
| TX/RX 單頻 | 簡化天線設置和頻譜許可 |
| 時隙比例可調 | 可定制上下行帶寬平衡 |
| 透明UDP / 以太網支持 | 直接與現有的基於IP的系統兼容 |
| 集成串口 | 命令/控制和遙測交換的理想選擇 |
| 低延遲 | <50 毫秒端到端延遲 |
| 抗干擾性強 | OFDM調製和FEC確保性能穩定 |
結論
客戶要求嚴格的設置——結合遙測, 原始數據, 和 RS422 控制——說明原因 現代無人機系統需要自適應, 全雙工數據解決方案.
一個 TDD OFDM 雙向鏈路 提供:
- 即時的, 雙向以太網和串行通信
- 壓縮數據和原始數據的可擴展吞吐量
- 可靠同步 40 毫秒更新間隔
通過部署TDD OFDM系統, 無人機設計師可以實現完美的平衡 吞吐量, 延遲, 和可靠性, 使其成為下一代無人機通信網絡的骨幹.
常問問題
Q1: TDD OFDM 鏈路可以同時處理視頻和遙測嗎?
是. 系統支持以太網橋接, 允許多個數據流——視頻, 遙測, 和控制——同時復用.
第2季: TDD OFDM 鏈路的典型延遲是多少?
取決於配置和調製, 系統延遲通常為 30–50 毫秒, 適用於無人機實時控制和高清視頻傳輸.
Q3: 它與傳統的 COFDM 發射機有何不同?
傳統的COFDM系統是 單程 (僅限TX), 而 TDD OFDM 是 雙向, 在一個頻段支持數據和命令通道.
第四季: 是 1.7 MB @40ms 在 RF 上可行?
不直接. 未壓縮數據速率 (340 Mbps的) 對於典型的 COFDM 或 TDD OFDM 鏈路來說太高. 解決辦法就是壓縮, 下採樣, 或有選擇地傳輸關鍵數據部分.
Q5: 支持哪些接口?
TDD OFDM 模塊通常包括:
乙太網路 (10/100/1000 Mbps的) 用於UDP/TCP/IP通信
串行端口 (RS232/422/485) 用於命令或遙測交換
GPIO 或 CAN (可選的) 用於外部設備控制



COFDM


HDMI 編碼器轉 ISDB-T 射頻
將視訊 UVC 轉換為 IP RTSP, 類比 CVBS HDMI AHD SDI 視訊輸入, 乙太網路RTSP UDP視訊編碼器解碼器


無人機視訊數據鏈

無人機視訊數據鏈

無人機視訊數據鏈
問一個問題
感謝你的回應。 ✨