問: 有沒有實現OSD功能的硬體或軟體模組? 我需要在同一個UDP資料包中以高同步性傳輸視訊和遙測數據.
一個: 我們的系統支援UDP傳輸,可以同時傳輸視訊和遙測數據. 然而, 它們以單獨的 UDP 資料包形式發送. 如果您需要在單一串流中進行視訊和遙測, OSD應該疊加在前端 (例如, 在相機裡, 萬向節, 或編碼器) 在數據進入無線鏈路之前.
問: 影片和遙測真的可以打包到一個 UDP 資料包嗎? 這對我的申請至關重要.
一個: 不. 視訊和遙測資料在單獨的 UDP 資料包中傳輸.
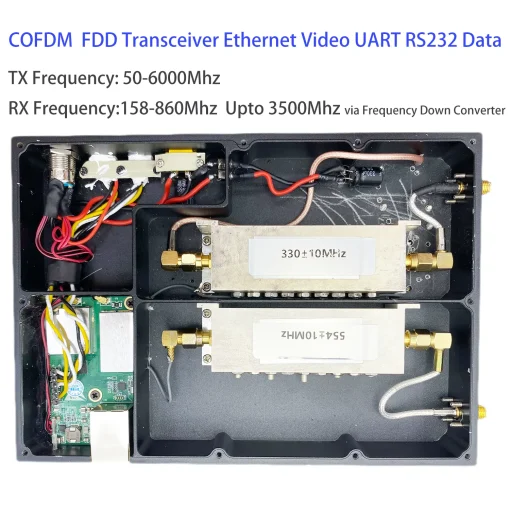
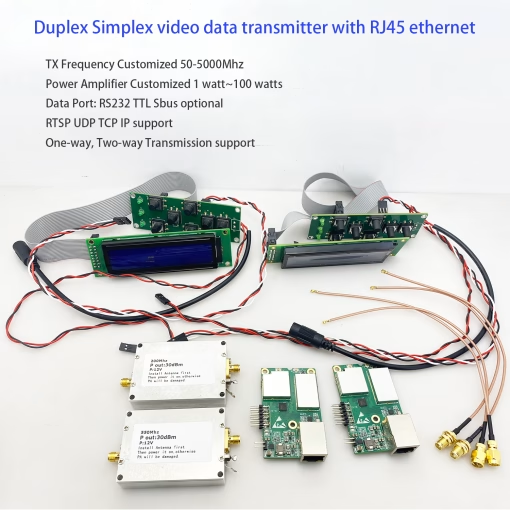
問: 我需要低頻, TX 和 RX 的不同頻道, 和我的數位相機的 RJ45 輸入 (他們不支援 HDMI, 僅以太網). 你能支持這個嗎?
一個: 是的. 視訊輸入透過乙太網路連接埠, 遙測輸入是透過數據連接埠進行的. 它們作為單獨的 UDP 資料包傳輸. 如果您需要將視訊和遙測合併到一個串流中, 您必須使用 OSD 將遙測覆蓋到前端的視訊上. 大多數IPC, 酬載吊艙, 甚至模擬系統也支援此功能.
問: 是否 1886 模組將每個視訊幀與遙測資料一起打包到單一 UDP 資料包中?
一個: 這 1886 模組作為無線鏈路進行透明傳輸. 它傳輸您提供的數據 (影片或遙測) 不加修改. 在某些配置中, 遙測資料可轉換為網口資料並與視訊資料一起傳輸, 但整合成同一個UDP資料包必須在前端處理後再進入模組.
問: 我想從飛行控制器傳輸遙測數據 (馬夫林克 2 協定) 以及來自相機的視訊串流 (即時傳輸協定), 將它們打包成一個UDP資料包, 並以精確的幀同步將它們發送到地面. 你的模組可以做到這一點嗎?
一個: 這 1886 模組支援透過UDP透傳Mavlink遙測和RTSP視頻. 然而, 視訊和遙測在大小和頻率上本質上是不同的, 使得同一 UDP 封包內的精確同步變得非常困難. 空中單元接受視訊和遙測輸入,地面單元分別輸出它們. 如果您需要嚴格同步, 傳輸前應將遙測資料疊加到前端的視訊上.
問: 視訊和遙測可以在完全相同的UDP資料包中傳輸嗎?
一個: 不. 模組發送哪個資料包 (影片或遙測) 首先到達. 兩種類型的資料都排隊等待傳輸, 以先到者為準,立即發送. 視訊和遙測資料包之間的延遲非常小 (只需幾毫秒), 但它們沒有合併成一個資料包.
所以vcan1886支援上下行頻率不等的不同包的UDP透傳.
問一個問題
感謝你的回應。 ✨