 | 비행기, UAV, 무인 비행기 |
 | 헬리콥터 |
 | 지상통제소 |
 | 원격 제어 S버스 |
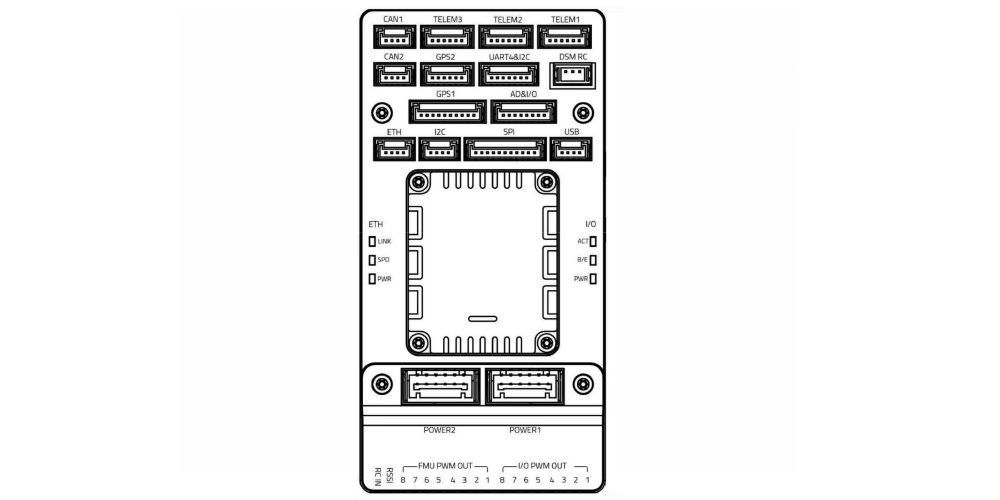 | FC 비행 컨트롤러 |
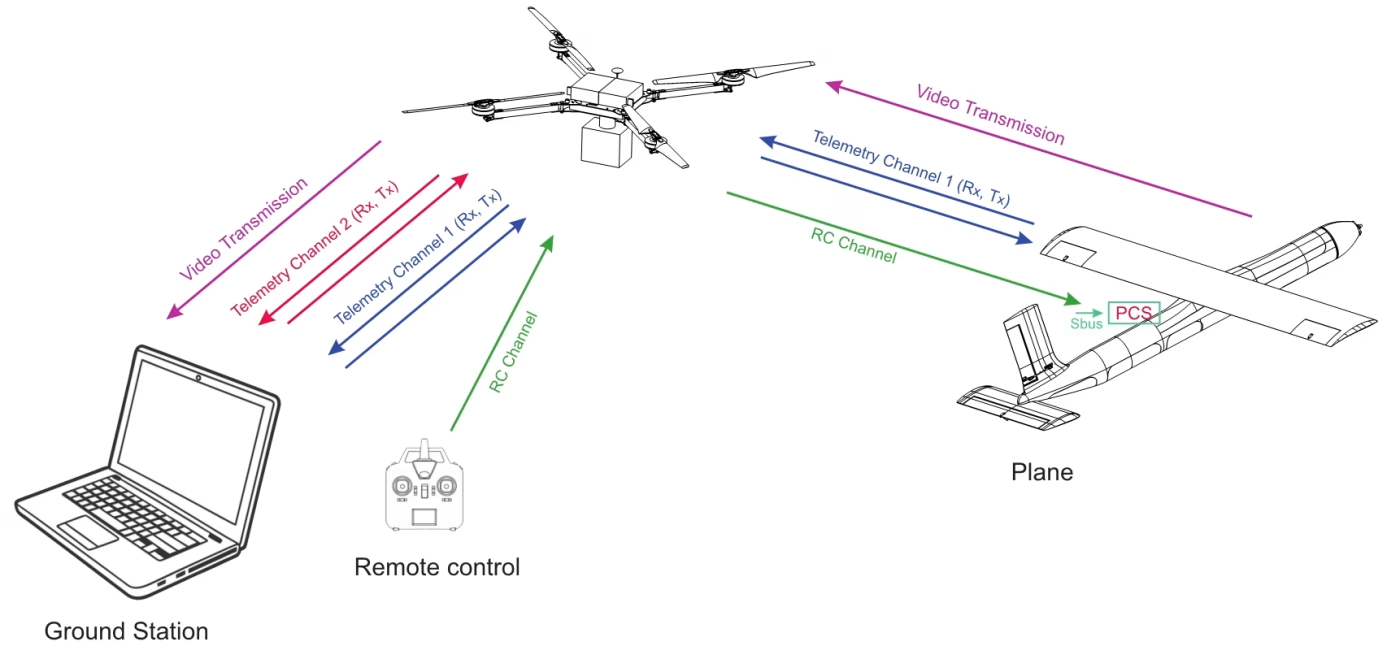
| 원격 측정 채널 1 (수신, 송신) | 일반 스테이션과 지상 스테이션 사이의 원격 측정 채널 (양방향 의사소통) |
| RC 채널 | 리모콘과 일반 사이의 RC 채널 (일방적인 의사소통) |
| 원격 측정 채널 2 (수신, 송신) | 지상국과 헬리콥터 재번역기 간의 원격 측정 채널 (양방향 의사소통) |
| 비디오 전송 | 일반 스테이션과 지상 스테이션 간의 비디오 채널 (일방적인 의사소통) |
이 개략도는 시스템 연결을 보여줍니다. (데이터 및 비디오) 우리가 만들고 싶은 것
요구사항
우리는 독립적인 구성 요소로 구성된 시스템을 가지고 있습니다., 그 사이에는 의사소통이 있어야 한다.
통신 시스템에는 두 가지 주요 섹션이 있습니다.:
데이터 전송 및 비디오 전송.
우리가 구현하고 싶은 주요 기능
- 재번역기를 통해 항공기에 데이터를 보내고 지상국에서 수신해야 합니다..
- 원격 제어로 재번역기를 통해 항공기에 데이터를 전송해야 합니다.
- 지상국의 재번역기를 통해 항공기로부터 비디오를 수신해야 합니다..
- 재번역기와 평면 사이의 거리 범위는 다음과 같아야 합니다. 50 km (단방향 비디오 링크는 단순 데이터 링크를 의미합니다.)
- 데이터를 재번역기로 보내고 지상국에서 수신해야 합니다..
- 데이터 전송은 안전해야 합니다 (호핑 주파수)
- 비디오 품질 – HD
- 비디오 지연 시간 50 밀리초
- 작업 능력 4 독립적인 비표준 채널 (회수) 영상 전송을 위해
- 영상 전송 채널 변경 가능성 (회수) 작동 중
해결책
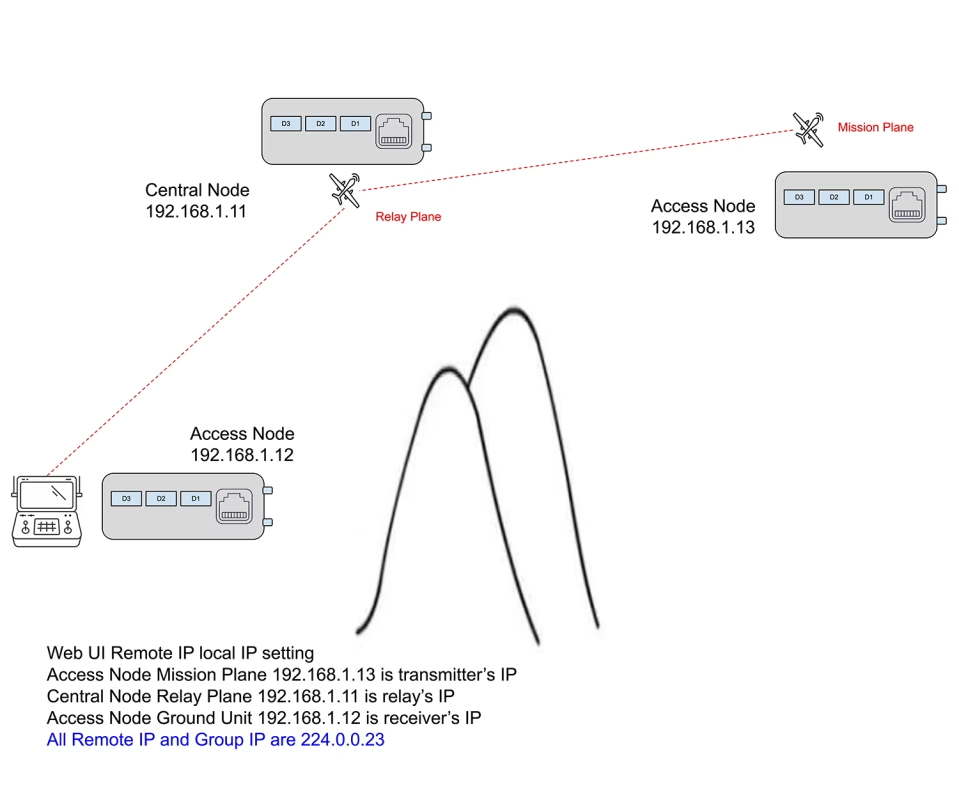
우리는 추천했습니다 TX900-5WPA-50KM 3 단위. 임무 비행기의 송신기로 하나, 하나는 지상 제어 스테이션의 지상 수신기로 사용됩니다., 릴레이로 또 하나 / 연발총 / 중계 헬리콥터의 재번역가.
자주하는 질문
Q1: 중앙 헬리콥터에서 지상 관제소까지의 거리는 얼마입니까?, 미션 드론에서 중간 헬리콥터까지의 거리는 얼마나 되나요??
ㅏ: 우리는 귀하의 프로젝트 요구에 따라 다양한 전송 거리에 대한 솔루션을 제공할 수 있습니다..
위의 고객은 필요합니다 1 에 2 지상에서 중계 헬리콥터까지의 킬로미터. 중계부터 미션드론까지, 그것은 50 킬로미터. 이는 일반적인 응용 프로그램입니다.. 고객은 비행을 원합니다. 1 에 2 지상 통제 끝에서 킬로미터 위. 원격 드론의 제어 및 실시간 모니터링을 위해 지상 건물이나 인근 산의 장애물을 극복하는 데 사용됩니다..
큐: 4개를 따로 사용하나요?, 영상 전송을 위한 비표준 주파수?
ㅏ: 우리는 제공할 수 있습니다 6 20Mhz 대역폭을 기반으로 한 작동 주파수, 1420Mhz와 같은, 1440MHz의, 1460MHz의, 1480MHz의, 1500Mhz 및 1520Mhz.
큐: 작업 중에 영상 전송 주파수를 변경할 수 있나요??
ㅏ: 당사의 무선 비디오 및 데이터 중계 솔루션은 신호 강도를 기반으로 가장 강한 신호의 주파수를 자동으로 선택할 수 있습니다.. 우리는 이것을 주파수 호핑이라고 부릅니다.. 이 과정에서 주파수를 수동으로 전환할 수 있는 방법은 없습니다.. 구성 중에 특정 주파수 범위를 선택하지 않는 한, 1420~1530Mhz의 전체 주파수 범위가 아닌.
큐: 영상 전송 중, 장치가 간섭을 식별하고 이후에 주파수를 조정하는 방법은 무엇입니까??
신호 강도에 따라, 드론의 송신기, 중계기와 수신기가 자동으로 가장 강한 신호를 선택합니다., 사용 가능한 주파수 전반에 걸쳐 신호 품질 비교.
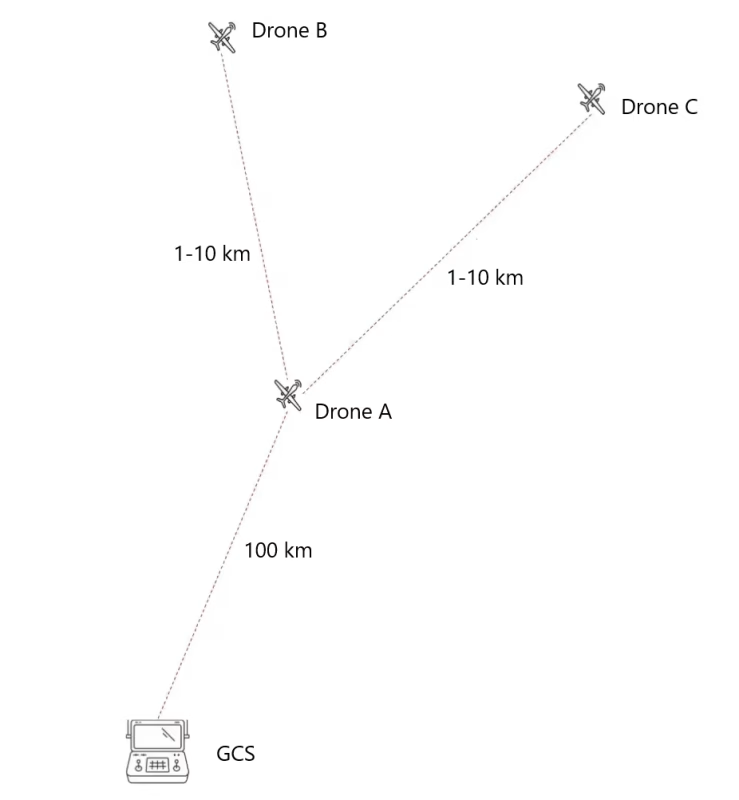
위 그림과 같은 시스템에 대한 솔루션을 찾고 있습니다.. GCS는 드론 A와 함께 지속적으로 LOS에 있고, 드론 A는 드론 B 및 C와 함께 LOS에 있습니다..
드론 B와 C를 제어하기 위한 지연은 가능한 한 작아야 합니다.. 서로 다른 구성으로 드론 B와 C를 제어할 때 지연 시간을 어떻게 예상하시나요?? 드론 A의 비용은 클 수 있지만 드론 B와 C의 비용은 최대한 낮아야 합니다..
예를 들어 드론 A와 드론 B+C 사이에 아날로그 시스템을 사용할 수 있습니까?? 지연과 가격을 최대한 낮게 유지하려면. 아날로그 시스템의 영상은 드론 A를 통해 어떻게 GCS로 전송되나요??
자세한 정보나 요구 사항을 문의하세요.. 이 정도로 정보가 충분하다면, 이 설정을 실행하기 위한 모델과 옵션을 추천해 주시겠어요??
질문하기
응답해 주셔서 감사합니다. ✨