 | Самолет, БЛА, Дрон |
 | Хеликоптер |
 | Наземна контролна станция |
 | Sbus за дистанционно управление |
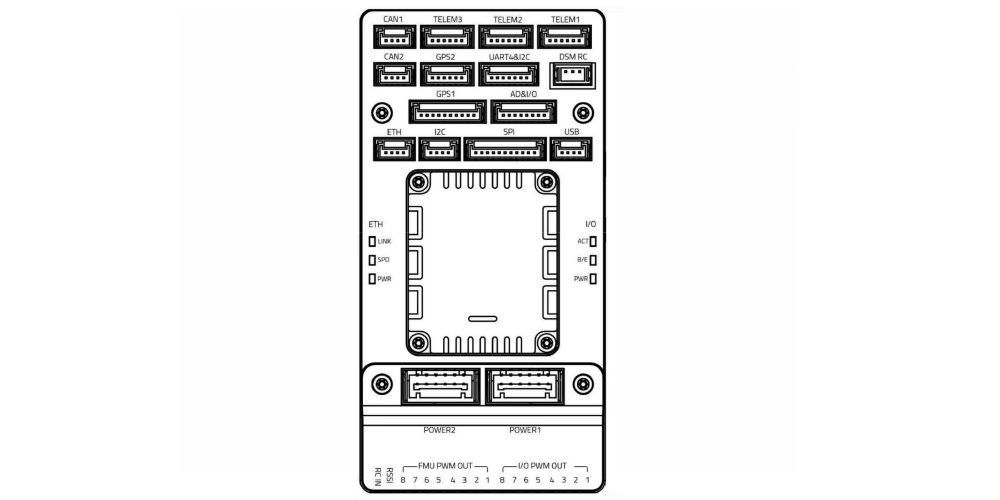 | Контролер на полети на FC |
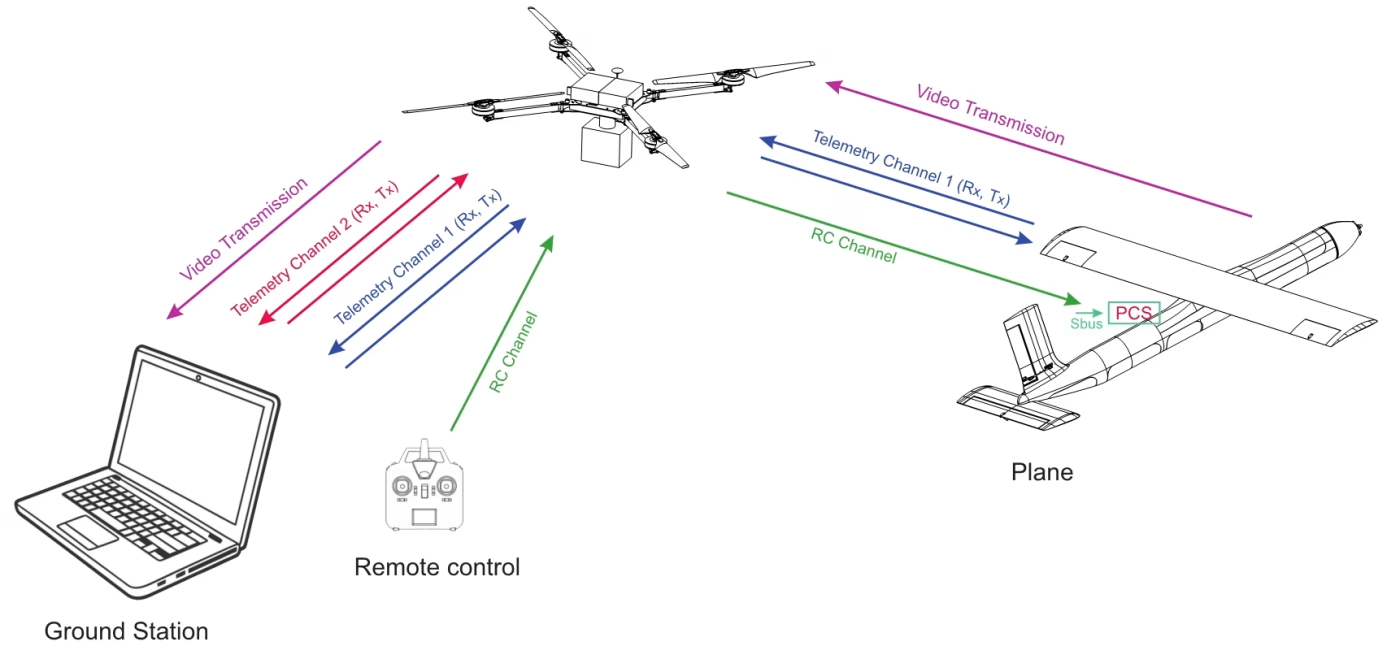
| Телеметричен канал 1 (Rx, Tx) | Телеметричен канал между обикновена и наземна станция (двустранна комуникация) |
| RC канал | RC канал между дистанционно управление и обикновен (едностранна комуникация) |
| Телеметричен канал 2 (Rx, Tx) | Телеметричен канал между наземната станция и ретранслатора на Copter (двустранна комуникация) |
| Видео предаване | Видеоканал между обикновена и наземна станция (едностранна комуникация) |
Тази схематична диаграма показва системните връзки (данни и видео) които искаме да изградим
Изисквания
Имаме система, състояща се от независими компоненти, между които трябва да има комуникация.
Комуникационната система има две основни секции:
предаване на данни и видео предаване.
Основните функции, които искаме да реализираме
- Трябва да изпратим данни до самолета чрез ретранслатор и да ги получим на наземна станция.
- Трябва да изпратим данни до самолета чрез ретранслатор с дистанционно управление
- Трябва да получим видео от самолета чрез ретранслатор на наземна станция.
- Разстоянието между ретранслатора и самолета трябва да бъде 50 км (еднопосочна видео връзка това е средна симплексна връзка за данни)
- Трябва да изпратим данни до ретранслатора и да ги получим на наземна станция.
- Предаването на данни трябва да е безопасно (честота на скачане)
- Качество на видеото – HD
- Видео латентност 50 милисекунди
- Възможност за работа върху 4 независими нестандартни канали (честота) за видео предаване
- Възможност за промяна на каналите за видео предаване (честота) по време на работа
Решение
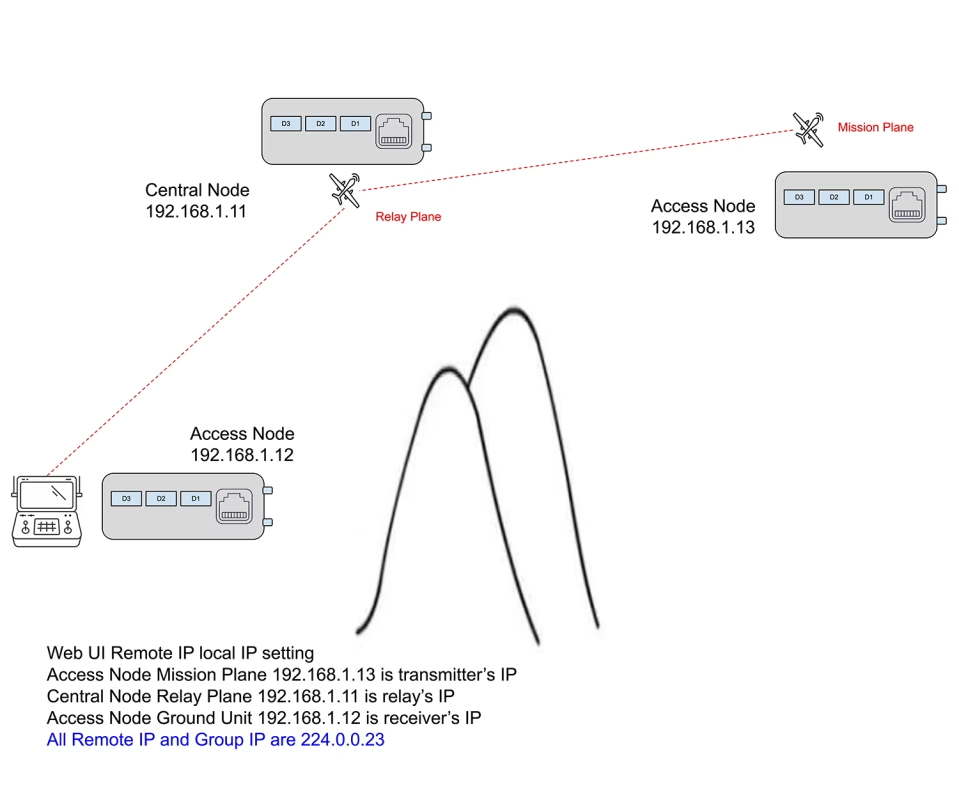
Препоръчахме TX900-5WPA-50KM 3 единици. Един като предавател в самолета на мисията, един като наземен приемник за наземна контролна станция, друг като релето / повторител / ре-преводач на щафетния хеликоптер.
ЧЗВ
Q1: Какво е разстоянието от средния хеликоптер до наземната контролна станция, и какво е разстоянието от дрона на мисията до средния хеликоптер?
А: Можем да предоставим решения за различни разстояния на предаване според нуждите на вашия проект.
Горният клиент изисква 1 да се 2 километри от земята до релейния хеликоптер. От щафетата до дрона на мисията, така е 50 километри. Това е типично приложение. Клиентът се надява да лети 1 да се 2 километра над края на наземния контрол. Използва се за преодоляване на препятствието на наземни сгради или близки планини, за да се постигне контрол и наблюдение в реално време на отдалечени дронове.
Въпрос:: Използва ли четири отделни, нестандартни честоти за видео предаване?
А: Ние можем да осигурим 6 работни честоти, базирани на 20Mhz честотна лента, като например 1420Mhz, 1440Mhz, 1460Mhz, 1480Mhz, 1500Mhz и 1520Mhz.
Въпрос:: Възможно ли е да се промени честотата на видео предаване по време на работа?
А: Нашите решения за безжично видео и предаване на данни могат автоматично да избират честотата с най-силен сигнал въз основа на силата на сигнала. Ние наричаме това прескачане на честотата. Няма начин за ръчно превключване на честотата в този процес. Освен ако не изберете определен честотен диапазон по време на конфигурацията, а не целия честотен диапазон от 1420~1530Mhz.
Въпрос:: По време на видео предаване, как устройството може да идентифицира смущението и впоследствие да коригира честотата му?
В зависимост от силата на сигнала, предавателя на дрона, ретранслаторът и приемникът автоматично избират най-силния сигнал, сравняване на качеството на сигнала в наличните честоти.
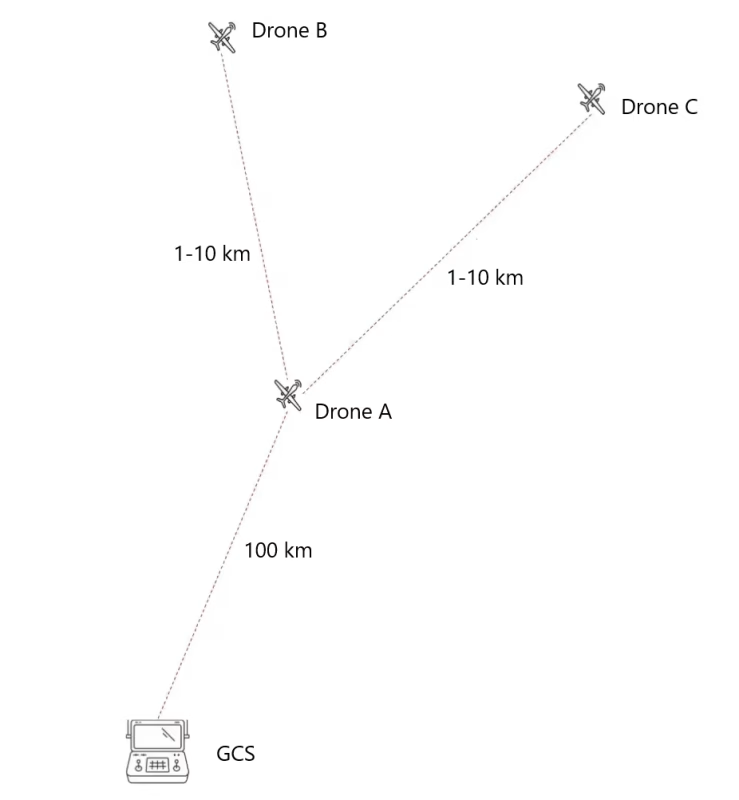
Търся решение за система като на снимката по-горе. GCS ще бъде постоянно в LOS с Drone A, а Drone A ще бъде в LOS с дроновете B и C.
Закъснението за управление на дроновете B и C трябва да бъде възможно най-малко. Каква е вашата оценка за забавянето при управление на дронове B и C с различни конфигурации? Цената на дрон A може да бъде голяма, но цената на дроновете B и C трябва да бъде възможно най-ниска.
Възможно ли е да се използва например аналогова система между дрон A и дрон B+C? За да запазите забавянето и цената възможно най-ниски. Как след това видеото на аналоговата система се предава на GCS чрез дрон A?
Моля, попитайте за повече информация или изисквания. Ако това е достатъчно информация, бихте ли препоръчали модели и опции за изпълнение на тази настройка?
Открийте повече от ISDB-T.com
Абонирайте се, за да получавате най-новите публикации на вашия имейл.
Задайте въпрос
Вашето съобщение е изпратено