 | เครื่องบิน, UAV, โดรน |
 | เฮลิคอปเตอร์ |
 | สถานีควบคุมภาคพื้นดิน |
 | รีโมทคอนโทรล Sbus |
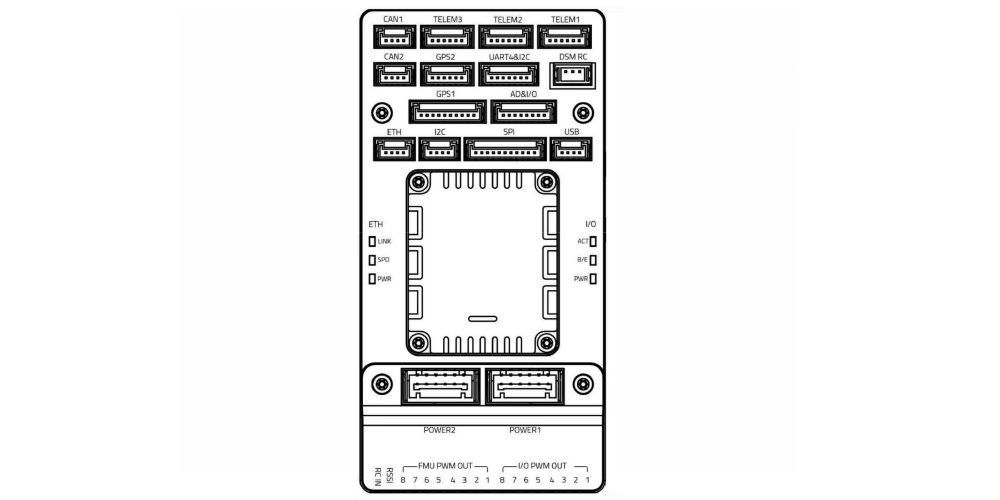 | ตัวควบคุมการบินเอฟซี |
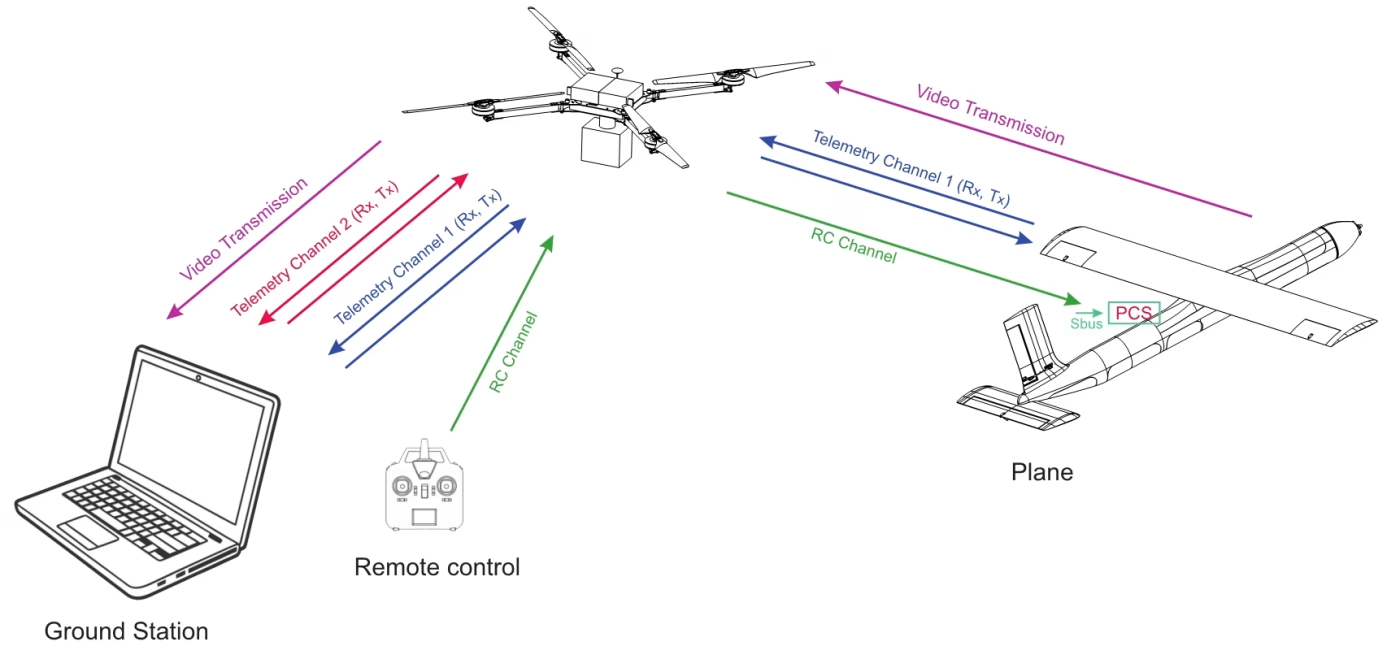
| ช่องทางโทรมาตร 1 (รับ, TX) | ช่องทาง Telemetry ระหว่างสถานีธรรมดาและภาคพื้นดิน (การสื่อสารสองด้าน) |
| ช่องอาร์ซี | ช่อง RC ระหว่างรีโมทคอนโทรลและธรรมดา (การสื่อสารด้านเดียว) |
| ช่องทางโทรมาตร 2 (รับ, TX) | ช่องทาง Telemetry ระหว่างสถานีภาคพื้นดินและนักแปล Copter Re-translator (การสื่อสารสองด้าน) |
| การส่งผ่านวิดีโอ | ช่องวิดีโอระหว่างสถานีธรรมดาและภาคพื้นดิน (การสื่อสารด้านเดียว) |
แผนผังนี้แสดงการเชื่อมต่อระบบ (ข้อมูลและวิดีโอ) ที่เราต้องการสร้าง
ความต้องการ
เรามีระบบที่ประกอบด้วยส่วนประกอบที่เป็นอิสระ, ระหว่างนั้นจะต้องมีการสื่อสาร.
ระบบการสื่อสารมีสองส่วนหลัก:
การส่งข้อมูลและการส่งสัญญาณวิดีโอ.
ฟังก์ชั่นหลักที่เราต้องการนำไปใช้
- เราจำเป็นต้องส่งข้อมูลไปยังเครื่องบินผ่านเครื่องแปลและรับที่สถานีภาคพื้นดิน.
- เราจำเป็นต้องส่งข้อมูลไปยังเครื่องบินผ่านเครื่องแปลใหม่ด้วยรีโมทคอนโทรล
- เราจำเป็นต้องรับวิดีโอจากเครื่องบินผ่านเครื่องแปลที่สถานีภาคพื้นดิน.
- ช่วงระยะห่างระหว่างตัวแปลซ้ำและระนาบควรเป็น 50 กม. (ลิงก์วิดีโอแบบทิศทางเดียวเป็นลิงก์ข้อมูลแบบ Simplex)
- เราจำเป็นต้องส่งข้อมูลไปยังผู้แปลใหม่และรับที่สถานีภาคพื้นดิน.
- การส่งข้อมูลจะต้องปลอดภัย (ความถี่ในการกระโดด)
- คุณภาพวิดีโอ – เอชดี
- เวลาแฝงของวิดีโอ 50 มิลลิวินาที
- ความสามารถในการทำงาน 4 ช่องที่ไม่ได้มาตรฐานอิสระ (ความถี่) สำหรับการส่งสัญญาณวิดีโอ
- ความเป็นไปได้ในการเปลี่ยนช่องส่งสัญญาณวิดีโอ (ความถี่) ระหว่างดำเนินการ
วิธีการแก้
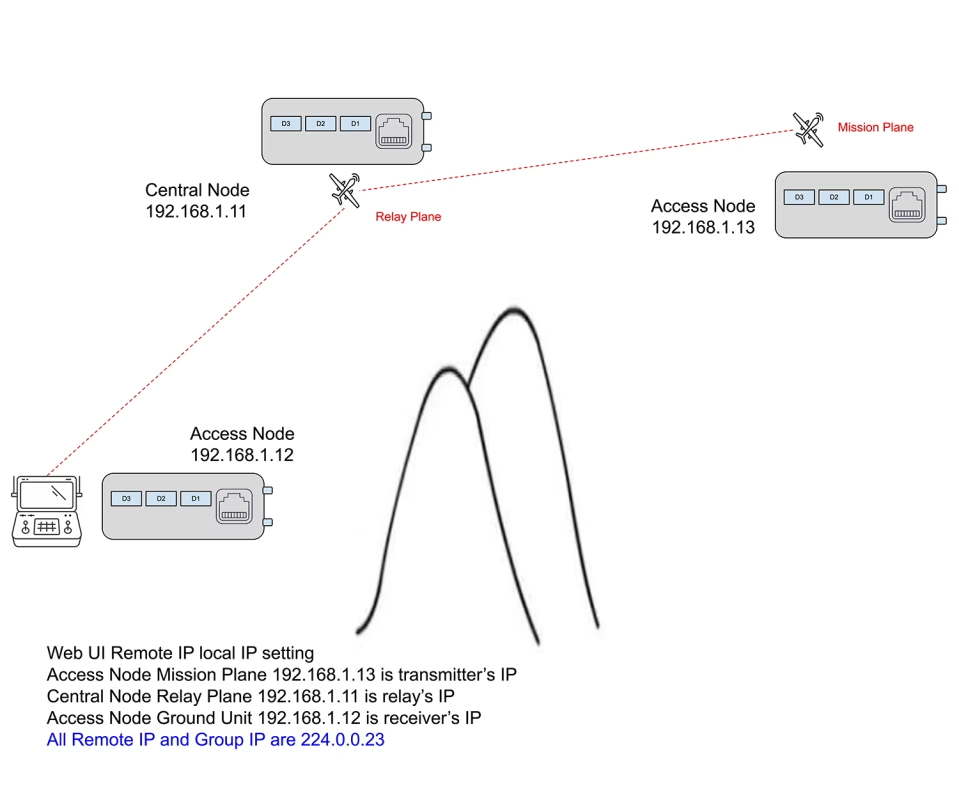
เราแนะนำ TX900-5WPA-50KM 3 หน่วย. คนหนึ่งเป็นผู้ส่งสัญญาณบนเครื่องบินภารกิจ, หนึ่งตัวเป็นเครื่องรับภาคพื้นดินสำหรับสถานีควบคุมภาคพื้นดิน, อีกอันหนึ่งเป็นรีเลย์ / ทวน / ล่ามใหม่ที่เฮลิคอปเตอร์รีเลย์.
คำถามที่พบบ่อย
คำถามที่ 1: ระยะทางจากเฮลิคอปเตอร์ลำกลางถึงสถานีควบคุมภาคพื้นดินคือเท่าใด, และระยะทางจากโดรนภารกิจถึงเฮลิคอปเตอร์ตัวกลางคือเท่าใด?
ก: เราสามารถจัดหาโซลูชั่นสำหรับระยะการส่งข้อมูลที่แตกต่างกันได้ตามความต้องการของโครงการของคุณ.
ลูกค้าข้างต้นต้องการ 1 ถึง 2 กิโลเมตรจากพื้นดินถึงเฮลิคอปเตอร์วิ่งผลัด. จากรีเลย์สู่ภารกิจโดรน, มันคือ 50 กิโลเมตร. นี่เป็นแอปพลิเคชันทั่วไป. ลูกค้าหวังจะบิน 1 ถึง 2 กิโลเมตรเหนือจุดสิ้นสุดการควบคุมภาคพื้นดิน. ใช้เพื่อเอาชนะสิ่งกีดขวางของอาคารภาคพื้นดินหรือภูเขาใกล้เคียง เพื่อให้สามารถควบคุมและติดตามโดรนระยะไกลได้แบบเรียลไทม์.
ถาม: มันใช้สี่แยกกันหรือเปล่า, ความถี่ที่ไม่ได้มาตรฐานสำหรับการส่งสัญญาณวิดีโอ?
ก: เราก็ให้ได้ 6 ความถี่ในการทำงานขึ้นอยู่กับแบนด์วิธ 20Mhz, เช่น 1420Mhz, 1440Mhz, 1460Mhz, 1480Mhz, 1500เมกะเฮิร์ตซ์และ 1520 เมกะเฮิร์ตซ์.
ถาม: สามารถเปลี่ยนความถี่ในการส่งสัญญาณวิดีโอขณะทำงานได้หรือไม่?
ก: โซลูชันการถ่ายทอดวิดีโอและข้อมูลไร้สายของเราสามารถเลือกความถี่ที่มีสัญญาณแรงที่สุดโดยอัตโนมัติตามความแรงของสัญญาณ. เราเรียกสิ่งนี้ว่าการกระโดดความถี่. ไม่มีวิธีเปลี่ยนความถี่ด้วยตนเองในกระบวนการนี้. เว้นแต่คุณจะเลือกช่วงความถี่ที่แน่นอนระหว่างการกำหนดค่า, แทนที่จะเป็นช่วงความถี่ทั้งหมดตั้งแต่ 1420~1530Mhz.
ถาม: ระหว่างการส่งสัญญาณวิดีโอ, อุปกรณ์สามารถระบุสัญญาณรบกวนและปรับความถี่ได้อย่างไร?
ขึ้นอยู่กับความแรงของสัญญาณ, เครื่องส่งสัญญาณของโดรน, เครื่องทวนสัญญาณและตัวรับสัญญาณจะเลือกสัญญาณที่แรงที่สุดโดยอัตโนมัติ, การเปรียบเทียบคุณภาพสัญญาณระหว่างความถี่ที่มีอยู่.
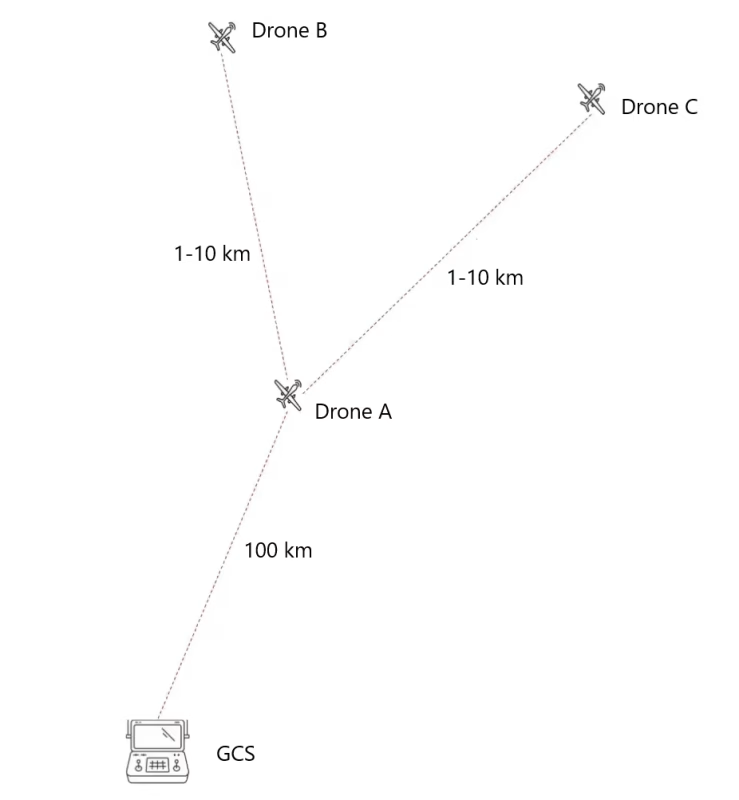
ฉันกำลังมองหาวิธีแก้ปัญหาสำหรับระบบเหมือนในภาพด้านบน. GCS จะอยู่ใน LOS อย่างต่อเนื่องพร้อมกับโดรน A และโดรน A จะอยู่ใน LOS พร้อมกับโดรน B และ C.
ความล่าช้าในการควบคุมโดรน B และ C ควรน้อยที่สุดเท่าที่จะเป็นไปได้. คุณประมาณความล่าช้าเมื่อควบคุมโดรน B และ C ด้วยการกำหนดค่าที่แตกต่างกัน? ราคาของโดรน A อาจสูงได้ แต่ราคาของโดรน B และ C ควรต่ำที่สุดเท่าที่จะเป็นไปได้.
เป็นไปได้หรือไม่ที่จะใช้ระบบอะนาล็อกระหว่างโดรน A และโดรน B+C เป็นต้น? เพื่อให้เกิดความล่าช้าและราคาให้ต่ำที่สุด. วิดีโอของระบบอะนาล็อกถูกส่งไปยัง GCS ผ่านโดรน A อย่างไร?
กรุณาสอบถามข้อมูลเพิ่มเติมหรือข้อกำหนด. ถ้าข้อมูลเท่านี้พอ., คุณช่วยแนะนำรุ่นและตัวเลือกสำหรับการดำเนินการตั้งค่านี้ได้ไหม?
ค้นพบเพิ่มเติมจาก ISDB-T.com
สมัครสมาชิกเพื่อรับโพสต์ล่าสุดที่ส่งไปยังอีเมลของคุณ.
ถามคำถาม
ข้อความของคุณถูกส่งไปแล้ว