 | Ինքնաթիռ, Ալիք, Դրոն |
 | Ուղղաթիռ |
 | Վերգետնյա կառավարման կայան |
 | Հեռակառավարման Sbus |
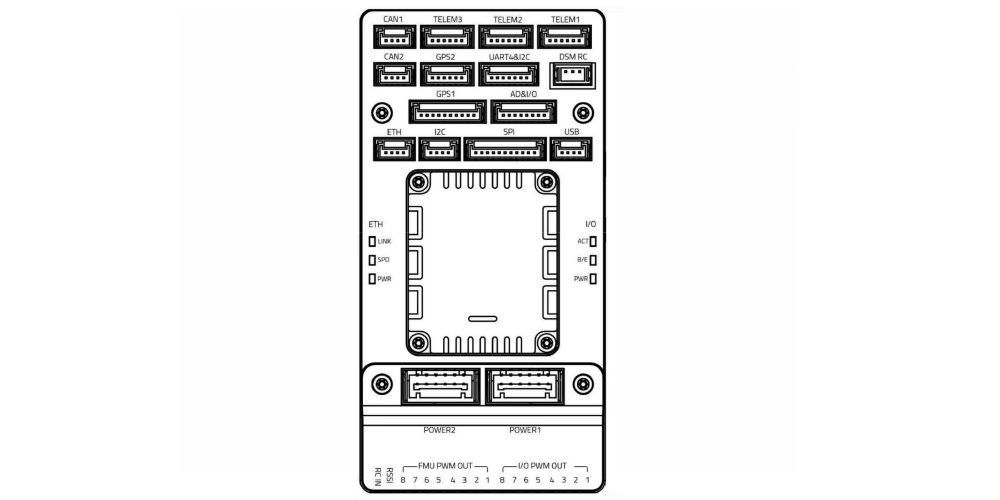 | FC Flight Controller |
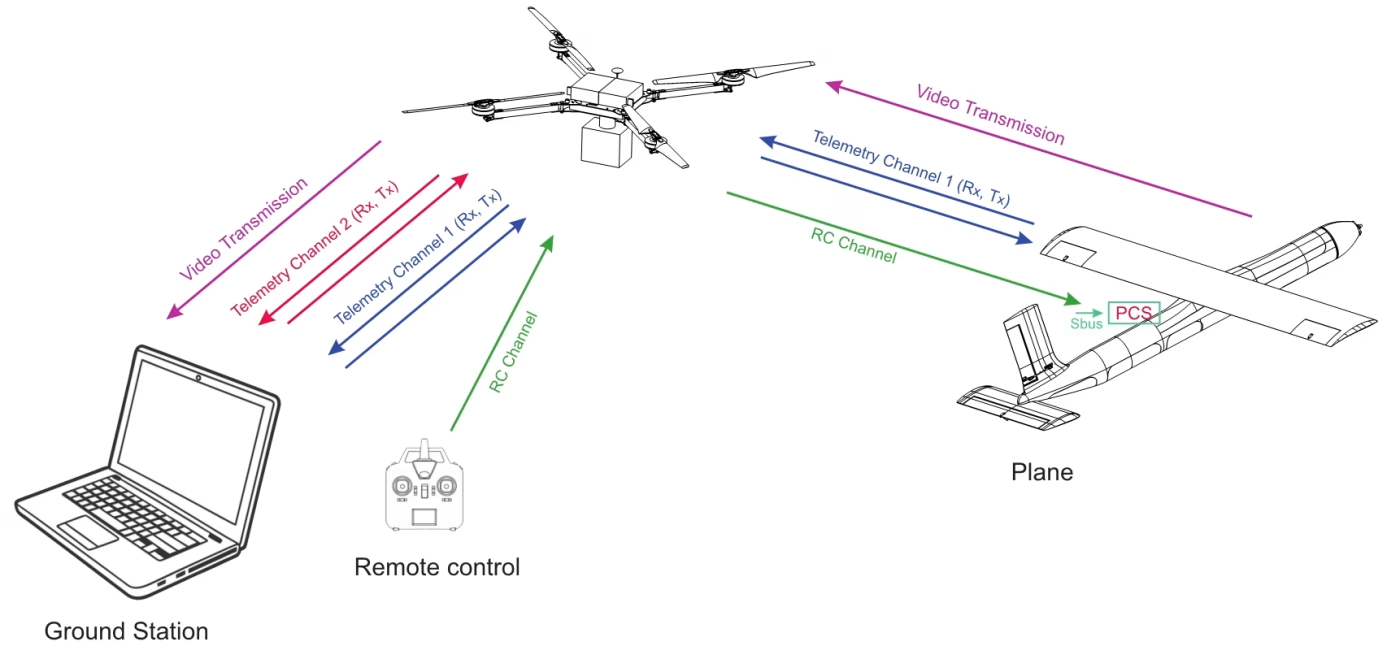
| Հեռուստաչափության ալիք 1 (Rx, Tx) | Հեռուստաչափական ալիքը հարթ և գետնին կայանների միջև (երկկողմանի հաղորդակցություն) |
| RC Channel | RC ալիք հեռակառավարման և պարզի միջև (միակողմանի հաղորդակցություն) |
| Հեռուստաչափության ալիք 2 (Rx, Tx) | Հեռուստաչափության ալիքը ցամաքային կայանի և Copter Re-translator-ի միջև (երկկողմանի հաղորդակցություն) |
| Տեսանյութի փոխանցում | Վիդեո ալիք Plain և Ground կայանների միջև (միակողմանի հաղորդակցություն) |
Այս սխեմատիկ դիագրամը ցույց է տալիս համակարգի կապերը (տվյալներ և տեսանյութեր) որ մենք ուզում ենք կառուցել
Պահանջներ
Մենք ունենք անկախ բաղադրիչներից բաղկացած համակարգ, որոնց միջև պետք է լինի հաղորդակցություն.
Կապի համակարգը ունի երկու հիմնական բաժին:
տվյալների փոխանցում և վիդեո փոխանցում.
Հիմնական գործառույթները, որոնք մենք ցանկանում ենք իրականացնել
- Մենք պետք է տվյալներ ուղարկենք ինքնաթիռին վերաթարգմանչի միջոցով և ստանանք դրանք վերգետնյա կայանում.
- Մենք պետք է տվյալներ ուղարկենք ինքնաթիռին վերաթարգմանչի միջոցով հեռակառավարման միջոցով
- Մենք պետք է օդանավից տեսագրություն ստանանք վերգետնյա կայանում գտնվող վերաթարգմանչի միջոցով.
- Վերաթարգմանչի և ինքնաթիռի միջև հեռավորությունը պետք է լինի 50 կմ (միակողմանի վիդեո հղում, դա նշանակում է տվյալների պարզ հղում)
- Մենք պետք է տվյալներ ուղարկենք վերաթարգմանիչին և ստանանք դրանք վերգետնյա կայանում.
- Տվյալների փոխանցումը պետք է ապահով լինի (ցատկելու հաճախականությունը)
- Տեսանյութի որակ – HD
- Տեսանյութի ուշացում 50 միլիվայրկյաններ
- վրա աշխատելու ունակություն 4 անկախ ոչ ստանդարտ ալիքներ (հաճախականությունը) վիդեո փոխանցման համար
- Տեսահաղորդման ալիքները փոխելու հնարավորություն (հաճախականությունը) շահագործման ընթացքում
լուծում
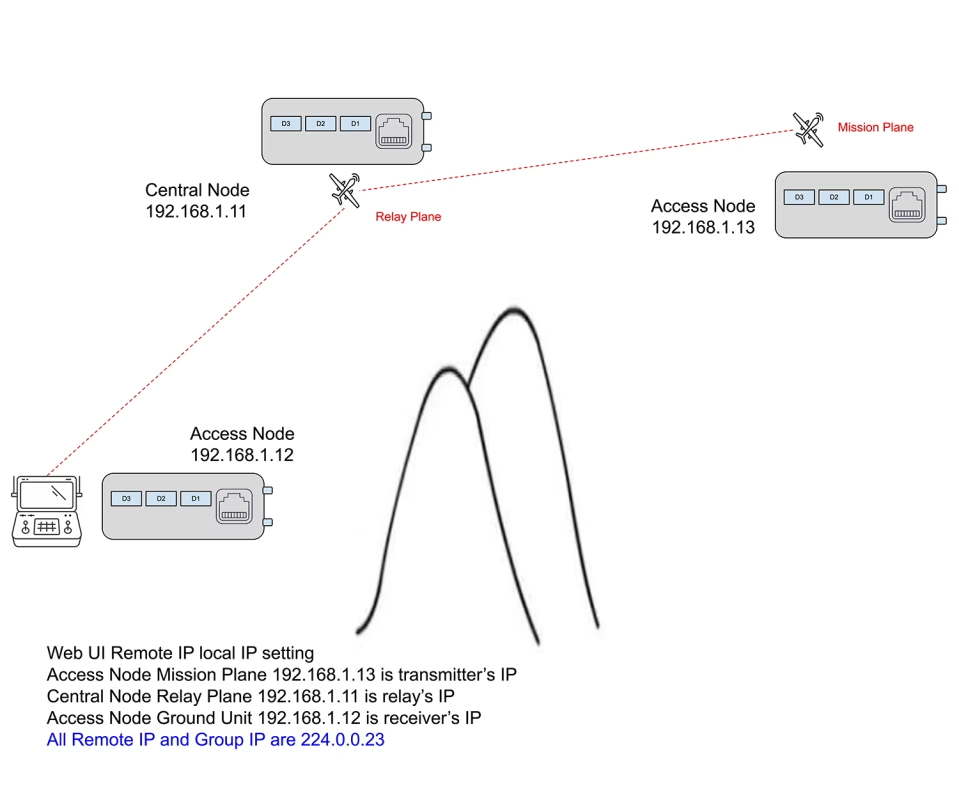
Մենք առաջարկեցինք TX900-5WPA-50KM 3 միավորներ. Մեկը որպես հաղորդիչ առաքելության ինքնաթիռում, մեկը՝ որպես վերգետնյա հսկիչ կայանի վերգետնյա ընդունիչ, ևս մեկը որպես ռելե / կրիչ / ռելե ուղղաթիռում վերաթարգմանիչ.
ՀՏՀ
Q1: Որքա՞ն է միջին ուղղաթիռից մինչև ցամաքային կառավարման կայան հեռավորությունը, և որքան է հեռավորությունը առաքելության անօդաչու թռչող սարքից մինչև միջին ուղղաթիռ?
Ա: Մենք կարող ենք լուծումներ տալ փոխանցման տարբեր հեռավորությունների համար՝ ըստ ձեր նախագծի կարիքների.
Վերոնշյալ հաճախորդը պահանջում է 1 դեպի 2 կիլոմետրեր գետնից մինչև ռելե ուղղաթիռ. Ռելեից մինչև առաքելության անօդաչու թռչող սարք, դա է 50 կիլոմետրեր. Սա տիպիկ հավելված է. Հաճախորդը հույս ունի թռչել 1 դեպի 2 կիլոմետր բարձրության վրա ցամաքային հսկողության ծայրից. Այն օգտագործվում է վերգետնյա շենքերի կամ մոտակա լեռների խոչընդոտումը հաղթահարելու համար՝ հեռավոր դրոնների վերահսկման և իրական ժամանակի մոնիտորինգի հասնելու համար։.
Հ: Արդյոք այն օգտագործում է չորս առանձին, տեսահաղորդման ոչ ստանդարտ հաճախականություններ?
Ա: Մենք կարող ենք ապահովել 6 գործառնական հաճախականություններ՝ հիմնված 20 ՄՀց թողունակության վրա, օրինակ՝ 1420 ՄՀց, 1440Մհզ, 1460Մհզ, 1480Մհզ, 1500ՄՀց և 1520 ՄՀց.
Հ: Հնարավո՞ր է փոխել վիդեո փոխանցման հաճախականությունը աշխատելիս?
Ա: Տեսանյութերի և տվյալների փոխանցման մեր անլար լուծումները կարող են ավտոմատ կերպով ընտրել ամենաուժեղ ազդանշանով հաճախականությունը՝ ելնելով ազդանշանի ուժից. Մենք այս հաճախականությունը կոչում ենք թռիչք. Այս գործընթացում հաճախականությունը ձեռքով փոխելու հնարավորություն չկա. Եթե կազմաձևման ընթացքում չընտրեք հաճախականության որոշակի տիրույթ, ոչ թե ամբողջ հաճախականության միջակայքը 1420-ից 1530 ՄՀց.
Հ: Տեսահաղորդման ժամանակ, ինչպես կարող է սարքը բացահայտել միջամտությունը և հետագայում կարգավորել դրա հաճախականությունը?
Կախված ազդանշանի հզորությունից, դրոնի հաղորդիչը, կրկնողն ու ստացողը ավտոմատ կերպով ընտրում են ամենաուժեղ ազդանշանը, համեմատելով ազդանշանի որակը հասանելի հաճախականությունների միջև.
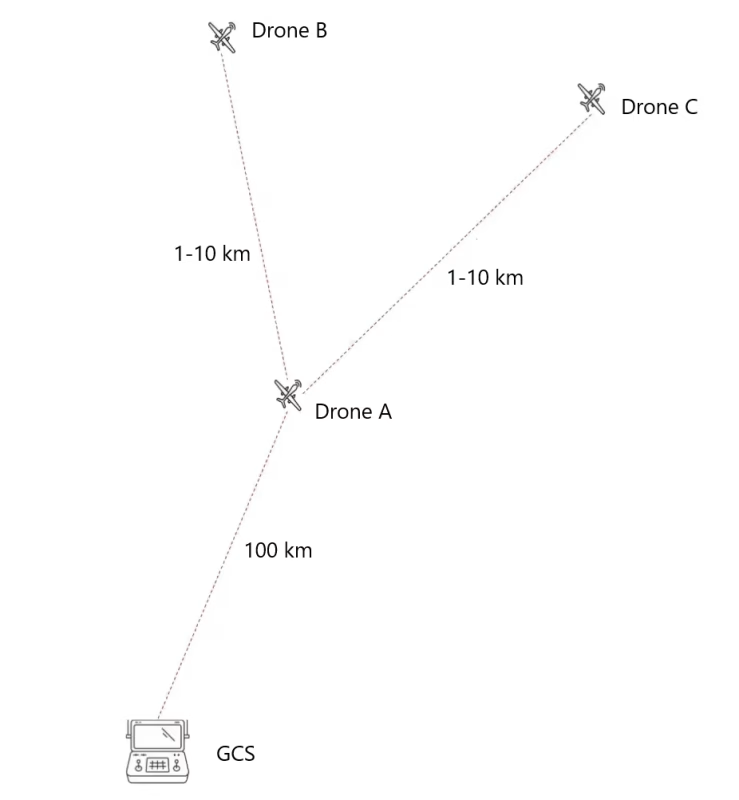
Ես լուծում եմ փնտրում այնպիսի համակարգի համար, ինչպիսին վերևի նկարում է. GCS-ն անընդհատ LOS-ում կլինի A-ով, իսկ անօդաչու A-ն՝ B-ով և C-ով:.
B և C անօդաչու սարքերը կառավարելու ուշացումը պետք է հնարավորինս փոքր լինի. Ինչ եք գնահատում ուշացումը B և C տարբեր կոնֆիգուրացիաներով անօդաչու թռչող սարքերի կառավարման ժամանակ? Drone A-ի արժեքը կարող է մեծ լինել, բայց B և C դրոնների արժեքը պետք է հնարավորինս ցածր լինի.
Հնարավո՞ր է օրինակ օգտագործել անալոգային համակարգ A և B+C դրոնների միջև? Հետաձգումը և գինը հնարավորինս ցածր պահելու համար. Ինչպե՞ս է անալոգային համակարգի տեսանյութն այնուհետև փոխանցվում GCS-ին անօդաչու A-ի միջոցով?
Խնդրում ենք լրացուցիչ տեղեկությունների կամ պահանջների համար. Եթե սա բավարար տեղեկատվություն է, կարող եք առաջարկել մոդելներ և տարբերակներ այս կարգավորումն իրականացնելու համար?
Բացահայտեք ավելին ISDB-T.com
Բաժանորդագրվեք՝ ձեր էլ.փոստին ուղարկված վերջին հաղորդագրությունները ստանալու համար.
Հարց տվեք
Ձեր հաղորդագրությունն ուղարկվել է