نظرة عامة على نظام Datalink للطائرات بدون طيار
ال نظام Datalink للطائرات بدون طيار تم تصميمه لتمكين موثوقة, التواصل في الوقت الحقيقي, يتحكم, ومراقبة العديد من المركبات الجوية بدون طيار (الطائرات بدون طيار). يتكون النظام من أربع طائرات بدون طيار, كل منها مجهز ب وحدة داتا لينك الجوية, أ كمبيوتر التحكم في الطيران (لجنة الاتصالات الفيدرالية, على سبيل المثال, كاذبة V5 +), وكاميرا/باحث, وكذلك أ وحدة داتا لينك الأرضية متصل ب محطة التحكم الأرضية (جي سي اس).
الميزات الرئيسية
- إعدادات: 1 الوحدة الأرضية تتواصل مع 4 وحدات الهواء عبر وصلة ثنائية الاتجاه من نقطة إلى عدة نقاط (إيثرنت + UART).
- يتراوح & أداء: ≥ 80 كيلومتر من خط البصر مع وصلات فيديو وقياس عن بعد قوية, دعم الفيديو 1080p في 30 إطارًا في الثانية وبيانات القياس/التحكم عن بعد بمعدل يصل إلى 921600 نقطة أساس.
- واجهات: توفر وحدات الهواء 1 منفذ UART للقياس عن بعد من قبل لجنة الاتصالات الفيدرالية (FCC) و 1 منفذ إيثرنت لبيانات الكاميرا. تقوم الوحدة الأرضية بتجميع هذه التدفقات وتقدم واجهة UART وEthernet واحدة إلى GCS.
- كابل & الأسلاك: تعمل اتصالات TTL UART المباشرة على تقليل زمن الوصول والتعقيد. تدعم كابلات Ethernet اتصالات Cat5e/Cat6 القياسية مع درع لحماية EMI.
- مصداقية & كمون: معدل خطأ البت < 8×10⁻⁸, تأخير البيانات < 1 آنسة, فقدان الحزمة < 1%, مع FEC, اتفاقية حقوق الطفل, وآليات ARQ لضمان التشغيل المستمر.
- مرونة النظام: يتم وضع علامة على كل تدفق بيانات بمعرف طائر فريد, السماح لـ GCS بتحديد وإدارة الطائرات بدون طيار الفردية. يستمر النظام في العمل حتى لو فقدت طائرة واحدة أو أكثر من الطائرات بدون طيار الاتصال مؤقتًا.
يضمن نظام Datalink هذا التكامل السلس بين الطائرات بدون طيار, الكاميرات, والسيطرة الأرضية, توفير خفيفة الوزن, حل عالي الأداء لعمليات متعددة الطائرات بدون طيار في الوقت الحقيقي.
وثائق متطلبات ربط البيانات
يتألف النظام من ستة عشر وحدة Datalink Air المحمولة جواً (واحد لكل طائر), وحدة أرضية Datalink واحدة, ومحطة التحكم الأرضية (جي سي اس). والغرض من ذلك هو تحديد واجهات, أطوال الكابلات, تعداد المنافذ, واختبارات القبول بحيث تتفاعل الوحدات التي يسلمها الموردون مع لجنة الاتصالات الفيدرالية (FCC) الحالية (كمبيوتر التحكم في الطيران), الكاميرات (الباحثين), وGCS.
مطلوب حل كامل لإنشاء ارتباط البيانات بين أرضي محطة و 4 هواء الطائرات بدون طيار وحدات. يجب أن يتيح النظام اتصالات موثوقة, يتحكم, ومراقبة جميع الطائرات بدون طيار في وقت واحد. يتم توفير المتطلبات الفنية التفصيلية أدناه.
ملخص:
- إعدادات: 1 × وحدة التحكم الأرضية (جي سي يو) التواصل مع 4 × وحدات هوائية (خارج)
- نوع الاتصال: وصلة ثنائية الاتجاه من نقطة إلى عدة نقاط (إيثرنت + UART)
- يتراوح: ≥ 80 كم خط البصر (لوس)
- نطاق التشغيل: 1.4غيغاهيرتز(إل باند)
- مخطط التعديل: تد-OFDM / QPSK / 16-قم
- متطلبات الطاقة: جهد التشغيل (12V), العتبة الحالية (≤ 2A)
- نطاق درجة الحرارة: -20درجة مئوية إلى 75 درجة مئوية
إنتاجية البيانات وعرض النطاق الترددي:
| المعلمة | متطلبات | ملحوظات |
| معدل بيانات الفيديو (لكل باحث) | 5 - 9 ميغابت في الثانية | 1080ص @ 30 ضغط الإطارات في الثانية H.264/265 |
| القياس عن بعد + يتحكم (لكل لجنة الاتصالات الفدرالية) | 200 - 300 كيلو بايت في الثانية | بيانات التحكم ثنائية الاتجاه المستندة إلى UART |
| إجمالي إنتاجية الفيديو (4 خارج) | 24 - 36 ميغابت في الثانية | وصلة الفيديو المدمجة |
| إجمالي القياس عن بعد / التحكم | 1 ميغابت في الثانية | لا يكاد يذكر مقارنة بالفيديو |
| إجمالي عرض النطاق الترددي للوصلة الصاعدة المطلوبة | ≥ 36 ميغابت في الثانية | مع 20% FEC + النفقات العامة ≈ 42 ميغابت في الثانية |
متطلبات الكمون والجودة:
| المعلمة | متطلبات | ملحوظات |
| معدل الخطأ في البت | < 8×10-8 | في أقصى مدى |
| تأخير البيانات | < 1آنسة | مطلوب لتشغيل الباحث في الوقت الحقيقي ونقل البيانات |
| فقدان الحزمة | < 1% | مع لجنة الانتخابات الفيدرالية + آليات ARQ |
| تصحيح الخطأ | FEC + اتفاقية حقوق الطفل + طلب ARQ | إلزامية لموثوقية القياس عن بعد |
ربط الميزانية & معلمات الترددات اللاسلكية:
| المعلمة | هدف قيمة | ملحوظات |
| نقل الطاقة (وحدة الهواء) | 4 – 5 دبليو | – |
| نقل الطاقة (الوحدة الأرضية) | 4 – 5 دبليو | – |
| كسب الهوائي (وحدة الهواء) | >3ديسيبل | نمط الهوائي: الخواص |
| كسب الهوائي (الوحدة الأرضية) | 12 - 18 ديسيبل | هوائي اتجاهي |
| حساسية المتلقي | -103dBm @ 10 ميجا هرتز | مقابل 10⁻⁵ بير |
| هامش الرابط @ 80 كم | > 10 ديسيبل | يضمن فيديو قوي + رابط البيانات |
ملحوظة:
- للتكامل السلس بين وحدة التحكم في الطيران CUAV V5+ والأجهزة الطرفية الخارجية, من الضروري أن يحافظ نول UART على هيكل الأسلاك المباشر وغير معقد. خاصة, يجب تصميم النول من منفذ UART على أنه اتصال خط مستقيم واحد دون إدخال أي محولات إضافية أو لوحات وسيطة. وهذا يقلل من نقاط الفشل المحتملة, يقلل الكمون, ويضمن بنية أسلاك خفيفة الوزن وموثوقة.
- بالإضافة إلى, يجب أن يعمل النول وفق منطق الترانزستور-الترانزستور (TTL) مستويات الجهد, كما تتواصل وحدة التحكم في الطيران V5+ عبر TTL UART. أي انحراف عن TTL (مثل مستويات RS-232 أو RS-485) سيتطلب محولات أو محولات المستوى الخارجي, وهو ما يتعارض مع متطلبات النول المباشر. من خلال الالتزام بمعايير TTL, يتم الحفاظ على توافق الإشارة, ضمان:
- الاتصال المباشر بين V5+ والوحدات المتصلة.
- تقليل تعقيد الأجهزة عن طريق التخلص من المحولات أو المترجمين.
- انخفاض الوزن وتحسين الموثوقية, نظرًا لوجود عدد أقل من المكونات في مسار الإشارة.
- تحسين سلامة الإشارة, نظرًا لأن مراحل التحويل الإضافية يمكن أن تؤدي إلى عدم تطابق الضوضاء أو التوقيت.
- بالإضافة إلى, يجب أن يعمل النول وفق منطق الترانزستور-الترانزستور (TTL) مستويات الجهد, كما تتواصل وحدة التحكم في الطيران V5+ عبر TTL UART. أي انحراف عن TTL (مثل مستويات RS-232 أو RS-485) سيتطلب محولات أو محولات المستوى الخارجي, وهو ما يتعارض مع متطلبات النول المباشر. من خلال الالتزام بمعايير TTL, يتم الحفاظ على توافق الإشارة, ضمان:
ختاماً,يجب أن يوفر تصميم النول بشكل صارم مجموعة أسلاك UART مباشرة تعمل بجهد TTL,يتماشى مع المواصفات الكهربائية CUAV V5+ ويضمن الأداء الأمثل في التطبيقات المحمولة جواً.
نظرة عامة على النظام:
وصف النظام عالي المستوى:
- أربع طائرات بدون طيار, كل منها مجهز:
- 1 × وحدة داتا لينك الهوائية
- 1 × لجنة الاتصالات الفيدرالية (كمبيوتر التحكم في الطيران, على سبيل المثال, كاذبة V5 +)
- 1 × باحث / آلة تصوير
- 1 × وحدة داتا لينك الأرضية متصلة بمحطة التحكم الأرضية (جي سي اس).
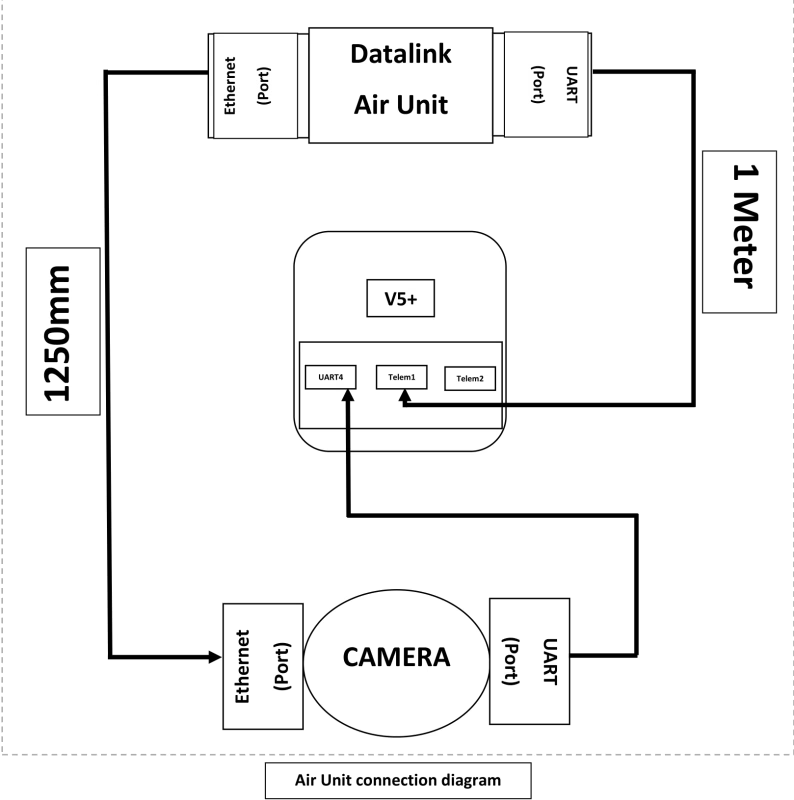
تدفق البيانات (ملخص): يتم توفير بيانات الفيديو والمستشعر من كل كاميرا إلى وحدة Datalink Air المرتبطة بها عبر منفذ Ethernet الخاص بالكاميرا. يتم نقل بيانات القياس والتحكم عن بعد بين لجنة الاتصالات الفيدرالية (FCC) والوحدة الجوية عبر رابط UART. تقوم وحدة Datalink Air بنقل هذه التدفقات عبر رابط البيانات إلى الوحدة الأرضية; تعمل الوحدة الأرضية على إزالة تعدد إرسال التدفقات وتقديمها إلى GCS كتدفق إيثرنت واحد (كاميرا الفيديو والبيانات) ومسلسل واحد (وارت/يو إس بي) تيار القياس عن بعد.
متطلبات وحدة الهواء:
كل وحدة Datalink Air (واحدة لكل طائرة بدون طيار) يجب أن تستوفي المتطلبات الإلزامية التالية:
1. واجهات & الموانئ (الحد الأدنى):
- 1 × منفذ UART (الحد الأدنى). يجب استخدام هذا المنفذ لتوصيل القياس عن بعد/التحكم بلجنة الاتصالات الفيدرالية (FCC). (منافذ القياس عن بعد Telem1 / Telem2 على لجنة الاتصالات الفيدرالية).
- 1 × منفذ إيثرنت (الحد الأدنى). يجب استخدام هذا المنفذ لتلقي بيانات إيثرنت الخاصة بالكاميرا/الباحث.
2. اتصال الكابل (تسليمها مع AirUnit):
- 1 × كابل UART (أساسي) - طول: 1.0 م (±5%). يجب أن يحمل الكابل TX, آر إكس, GND وVCC. يجب إنهاء الكبل ليتوافق مع موصل Datalink UART من أحد الطرفين وموصل القياس عن بعد التابع للجنة الاتصالات الفيدرالية (FCC) من الطرف الآخر.
- 1 × كابل إيثرنت (أساسي) - طول: 1.0 م (±5%). يجب أن يكون الكابل عبارة عن كبل توصيل Cat5e أو Cat6 محمي قياسيًا مع موصلات RJ45.
- 2 × أطقم احتياطية (لكل وحدة الهواء) - أي., يجب توفير كابلين UART إضافيين وكابلين إضافيين لشبكة Ethernet مع كل وحدة هوائية (إجمالي المعروض لكل وحدة = 3 كابلات UART, 3 كابلات إيثرنت).
3. ميكانيكية & بدني:
- يجب أن تكون الكابلات مرمزة بالألوان (مُستَحسَن) ولها علامات اتجاهية واضحة إذا كانت الدبابيس غير متماثلة.
4. كهربائي / بروتوكول:
UART: دعم معدلات الباود المشتركة حتى على الأقل 921600 نقطة أساس. توفير المستخدم- معلمات UART القابلة للتكوين.
إيثرنت: دعم على الأقل 100 عملية ميغابت في الثانية (يفضل جيجابت). دعم بروتوكولات النقل المشتركة (UDP, RTSP للفيديو وUDP للتحكم) - يجب أن يكون اختيار البروتوكول المحدد قابلاً للتكوين.
متطلبات الوحدة الأرضية:
تقوم الوحدة الأرضية بإزالة تعدد إرسال البيانات من جميع الوحدات الجوية الأربع وتقدم واجهة موحدة لنظام GCS. المتطلبات الإلزامية هي:
1. واجهات & الموانئ (الحد الأدنى):
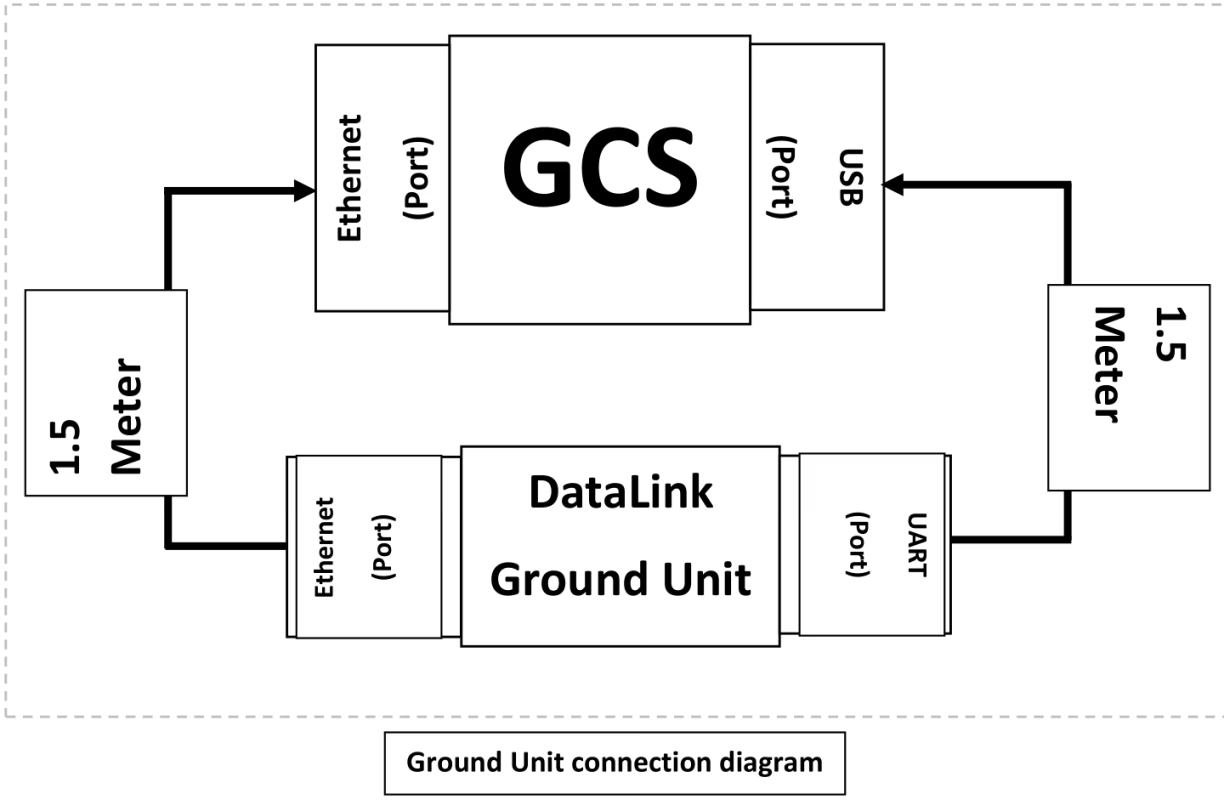
- 1 × منفذ UART (تم تقديمه إلى GCS). يجب على الوحدة الأرضية تجميع تدفقات القياس عن بعد من جميع الوحدات الهوائية الأربع وتقديمها إلى GCS كواجهة UART/USB واحدة (على سبيل المثال, الوحدة الأرضية UART متصلة بواجهة USB على GCS).
- 1 × منفذ إيثرنت (تم تقديمه إلى GCS). يجب أن تقوم الوحدة الأرضية بتجميع تدفقات الكاميرا/الفيديو والبيانات من الوحدات الهوائية الأربع وتقديمها كواجهة إيثرنت واحدة إلى GCS.
2. سلوك التجميع:
- يجب أن تقبل الوحدة الأرضية أربعة تدفقات مستقلة للبيانات الواردة (واحدة من كل وحدة هوائية) وإلغاء تعدد إرسالها إلى دفق Ethernet مدمج ودفق تسلسلي مدمج. من جي سي اس’ يجب أن يكون هناك رابط Ethernet واحد فقط ورابط UART واحد للتكوين والمراقبة.
- يجب أن يحافظ التجميع على عنوان المصدر, حتى يتمكن GCS من تحديد أي تيار ينتمي إلى أي طائر. يجب ألا تفقد الوحدة الأرضية معلومات تعريف كل طائر.
3. اتصال الكابل (يتم تسليمها مع الوحدة الأرضية):
- 1 × كابل UART (أساسي) - طول: 400 مم (0.4 م). يجب أن يسمح الكبل بالاتصال من منفذ UART للوحدة الأرضية إلى منفذ GCS USB (إذا كانت الوحدة الأرضية UART هي UART مباشر, توفير كابل محول USB-UART). يجب أن يحمل الكابل TX, آر إكس, GND وVCC.
- 1 × كابل إيثرنت (أساسي) - طول: 400 مم (0.4 م). يجب أن يكون الكابل محميًا بكابل التصحيح Cat5e/Cat6 مع موصلات RJ45.
- 2 × مجموعات احتياطية — كابلان UART إضافيان وكابلان إضافيان لشبكة Ethernet يتم توفيرهما كقطع غيار مع الوحدة الأرضية.
4. كهربائي / بروتوكول:
- يجب أن يكون التجميع شفافاً فيما يتعلق بإطارات إيثرنت للفيديو; عند الحاجة، قد تقوم الوحدة الأرضية بإعادة تجميع التدفقات في تيار نقل واحد ولكن يجب أن تحافظ على معلومات التوقيت وتحديد المصدر لكل طائر.
مضاعفة القياس عن بعد: يجب على الوحدة الأرضية مضاعفة الوقت أو حزم تدفقات القياس عن بعد في تدفق UART واحد مع إطار واضح وعلامات اختيارية لتمييز الرسائل حسب معرف الطائر. يجب توثيق البروتوكول المستخدم في تعدد الإرسال ودعمه بواسطة برنامج GCS.
الاتصال & مواصفات الكابل
يسرد هذا القسم مواصفات الكابلات والموصلات الموصى بها لضمان أداء موثوق به في البيئات المحمولة جواً والأرضية.
- كابلات إيثرنت (وحدة الهواء -> الكاميرا والوحدة الأرضية -> جي سي اس): كابلات التصحيح Cat5e أو Cat6 القياسية المحمية مع نهايات RJ45. استخدم محمية بالكامل (سان تومي وبرينسيبي) كابل إذا كان التثبيت يحتوي على EMI مرتفع.
- إيثرنت طول (هواء وحدة): 1.0 م ±5%.
- إيثرنت طول (أرضي وحدة): 400 مم ±5%.
- كابلات UART (وحدة الهواء -> القياس عن بعد للجنة الاتصالات الفيدرالية (FCC).): 4-كابل موصل (تكساس, آر إكس, أرض, RTS/CTS اختيارية). طول: 1.0 م ±5%.
- UART كابل (أرضي وحدة -> جي سي اس يو اس بي/يوارت): 400 مم ±5% (قم بتضمين محول USB-UART إذا لزم الأمر بواسطة GCS).
- حماية الكابلات والتأريض: قم بتوفير أرضية مشتركة وتأكد من إنهاء التدريع عند طرف واحد وفقًا لأفضل الممارسات لتجنب الحلقات الأرضية. استخدم قفل RJ45 أو موصلات الإغلاق إذا كان من المتوقع حدوث اهتزاز.
توفير كابلات محول لتوصيل Datalink UART بموصلات القياس عن بعد CUAV V5+ (إذا لم تعرض وحدة Datalink أصلاً موصلًا متوافقًا).
- حيث تدعم الكاميرا تقنية Power-over-Ethernet (بو) لكن وحدة Datalink Air لا توفر PoE, توفير حاقن PoE.
وظيفية & متطلبات البروتوكول
المتطلبات والتوصيات الوظيفية الرئيسية:
- تحديد هوية كل طائر: كل تيار البيانات (الفيديو أو القياس عن بعد) يجب أن يتم وضع علامة عليها بمعرف طائر فريد حتى يتمكن GCS من تعيين التدفقات للمركبات.
- تعدد مخطط: يجب على الوحدة الأرضية تنفيذ مخطط تعدد الإرسال الحتمي للقياس عن بعد (UART) السماح لـ GCS بتحليل الرسائل وتوجيهها بواسطة معرف الطيور.
- كمون و الإنتاجية: يجب على النظام تقليل زمن الوصول التجميعي الإضافي.
- مصداقية: يجب أن تتعامل الوحدة الأرضية مع الخسارة المؤقتة لوحدة هوائية واحدة أو أكثر بأمان وتستمر في تقديم التدفقات المتبقية إلى GCS.
- واجهة التكوين: توفير طريقة التكوين (وثيقة مفصلة) لتعيين معرفات الطيور, معدلات باود UART, والأولويات لكل تيار.
اطرح سؤالاً
شكرًا لردكم ✨