UAV Datalink System Overview
这 UAV Datalink System is designed to enable reliable, real-time communication, control, and monitoring for multiple unmanned aerial vehicles (UAVs). The system consists of four UAVs, each equipped with a Datalink Air Unit, a 飞行控制计算机 (FCC, 例如, 假V5+), and a camera/seeker, as well as a Datalink Ground Unit connected to a Ground Control Station (GCS).
主要特点
- Configuration: 1 Ground Unit communicating with 4 Air Units via a point-to-multipoint bidirectional link (以太网 + UART).
- Range & Performance: ≥ 80 km line-of-sight with robust video and telemetry links, supporting 1080p video at 30 fps and telemetry/control data at up to 921600 bps.
- 接口: Air Units provide 1 UART port for FCC telemetry and 1 Ethernet port for camera data. The Ground Unit aggregates these streams and presents a single UART and Ethernet interface to the GCS.
- 电缆 & Wiring: Straight-through TTL UART connections minimize latency and complexity. Ethernet cables support standard Cat5e/Cat6 connections with shielding for EMI protection.
- Reliability & Latency: Bit error rate < 8×10⁻⁸, data delay < 1 多发性硬化症, packet loss < 1%, with FEC, CRC, and ARQ mechanisms to ensure continuous operation.
- System Flexibility: Each data stream is tagged with a unique Bird ID, allowing the GCS to identify and manage individual UAVs. The system continues operating even if one or more UAVs temporarily lose connection.
This Datalink System ensures seamless integration between UAVs, cameras, and ground control, providing a lightweight, high-performance solution for real-time multi-drone operations.
Data link requirement documents
The system comprises sixteen airborne Datalink Air Units (每只鸟一只), a single Datalink Ground Unit, and a Ground Control Station (GCS). 目的是指定接口, 电缆长度, port counts, and acceptance tests so that units delivered by suppliers will interoperate with the existing FCC (flight control computer), cameras (探索者), and the GCS.
需要一个完整的解决方案来建立数据链路 ground station 和 4 UAV air units. 系统应能够实现可靠的通信, control, and monitoring of all UAVs simultaneously. Detailed technical requirements are provided below.
概述:
- Configuration: 1 × Ground Control Unit (通用控制单元) 与…沟通 4 × 航空单位 (出)
- 通讯类型: 点对多点双向链路 (以太网 + UART)
- Range: ≥ 80 公里视距 (LOS)
- 工作频段: 1.4兆赫(L波段)
- 调制方案: 时分双工正交频分复用 / QPSK / 16-QAM
- 电源要求: 工作电压 (12V), 当前阈值 (≤2A)
- 温度范围: -20°C 至 75°C
Data Throughput and Bandwidth:
| 范围 | Requirement | Notes |
| Video Data Rate (每个搜寻者) | 5 – 9 Mbps | 1080p@ 30 fps H.264/265 compression |
| 遥测 + Control (per FCC) | 200 – 300 kbps | 基于UART的双向控制数据 |
| Aggregate Video Throughput (4 出) | 24 – 36 Mbps | Combined video uplink |
| Aggregate Telemetry/Control | 1 Mbps | 与视频相比可以忽略不计 |
| 所需上行链路总带宽 | ≥ 36 Mbps | 和 20% FEC + 开销 ≈ 42 Mbps |
Latency and Quality Requirements:
| 范围 | Requirement | Notes |
| 误码率 | < 8×10-8 | 在最大范围内 |
| 数据延迟 | < 1多发性硬化症 | Required for real-time seekeroperation and data transmission |
| 丢包 | < 1% | 带前向纠错 + ARQ机制 |
| 纠错 | FEC + CRC + ARQ | 遥测可靠性的强制要求 |
链路预算 & 射频参数:
| 范围 | Target Value | Notes |
| 发射功率 (Air Unit) | 4 – 5 瓦 | – |
| 发射功率 (地面单位) | 4 – 5 瓦 | – |
| 天线增益 (Air Unit) | >3分贝 | 天线方向图: 各向同性 |
| 天线增益 (地面单位) | 12 – 18 分贝 | 定向天线 |
| Receiver Sensitivity | –103dBm @10 MHz | For 10⁻⁵ BER |
| 链接边距@ 80 km | > 10 分贝 | Ensures robust video + 数据链路 |
笔记:
- For seamless integration between the CUAV V5+ flight controller and external peripherals, UART 织机保持一个至关重要 direct and uncomplicated wiring structure. 具体来说, the loom from the UART port should be designed as a single straight line connection without introducing any additional converters or intermediary boards. 这最大限度地减少了潜在的故障点, 减少延迟, and ensures a lightweight and reliable wiring architecture.
- 此外, the loom must operate at Transistor-Transistor Logic (TTL) voltage levels, as the V5+ flight controller communicates via TTL UART. Any deviation from TTL (例如 RS-232 或 RS-485 电平) would necessitate external level shifters or converters, 这与直接织机的要求相矛盾. By adhering to TTL standards, signal compatibility is maintained, 确保:
- Direct communication between the V5+ and connected modules.
- Reduced hardware complexity by eliminating converters or translators.
- Lower weight and improved reliability, as fewer components are involved in the signal path.
- Improved signal integrity, since additional conversion stages can introduce noise or timing mismatches.
- 此外, the loom must operate at Transistor-Transistor Logic (TTL) voltage levels, as the V5+ flight controller communicates via TTL UART. Any deviation from TTL (例如 RS-232 或 RS-485 电平) would necessitate external level shifters or converters, 这与直接织机的要求相矛盾. By adhering to TTL standards, signal compatibility is maintained, 确保:
综上所述,the loom design should strictly provide a straight-through UART wiring harness operating at TTL voltages,aligning with the CUAV V5+electrical specifications and guaranteeing optimal performance in airborne applications.
系统概述:
High-level system description:
- 四架无人机, 每个配备:
- 1 × Datalink Air Unit
- 1 × FCC (飞行控制计算机, 例如, 假V5+)
- 1 × 探索者 / Camera
- 1 × Datalink Ground Unit connected with the Ground Control Station (GCS).
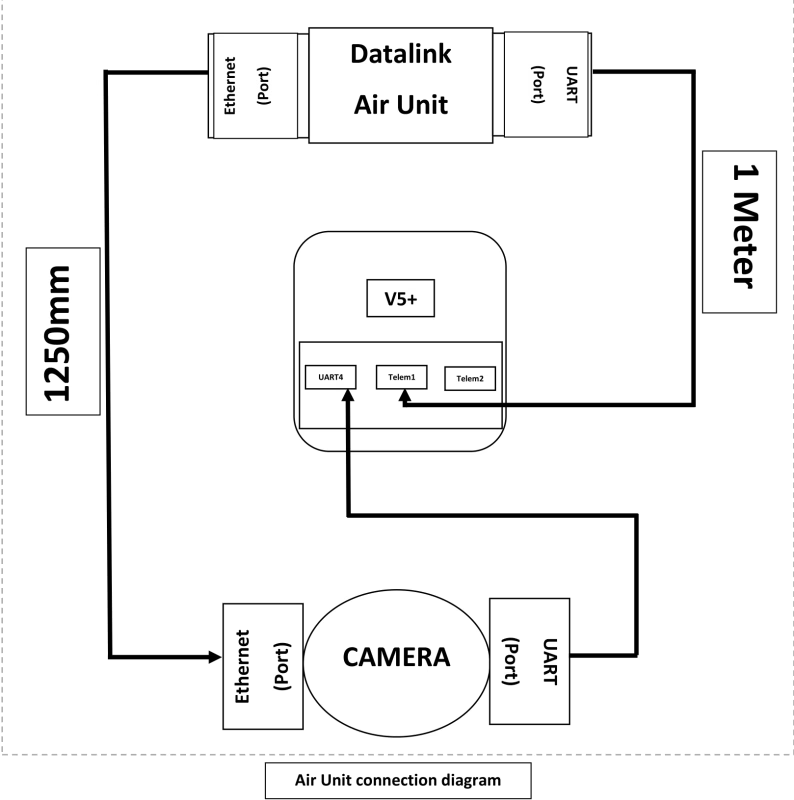
数据流 (概述): Video and sensor data from each camera is provided to its associated Datalink Air Unit via the camera’s Ethernet port. Telemetry and control data between the FCC and the Air Unit is carried over a UART link. The Datalink Air Unit transmits these streams over the data link to the Ground Unit; the Ground Unit demultiplexes the streams and presents them to the GCS as a single Ethernet stream (camera video and data) and a single serial (串口/USB) telemetry stream.
Air Unit Requirements:
每个数据链空中单元 (每架无人机一台) 应满足以下强制性要求:
1. 接口 & 港口 (minimum):
- 1 × 串口 (minimum). This port shall be used for telemetry/control connectivity to the FCC (telemetry ports Telem1 / Telem2 on the FCC).
- 1 × 以太网端口 (minimum). This port shall be used to receive camera/seeker Ethernet data.
2. Cable connectivity (delivered with the AirUnit):
- 1 × 串口线 (primary) — length: 1.0 m (±5%). Cable shall carry TX, RX, GND and VCC. Cable must be terminated to match the Datalink UART connector on one end and the FCC telemetry connector on the other.
- 1 × 以太网电缆 (primary) — length: 1.0 m (±5%). Cable shall be standard shielded Cat5e or Cat6 patch cable with RJ45 connectors.
- 2 × 备用套 (每空气单位) - IE。, two additional UART cables and two additional Ethernet cables shall be supplied with each Air Unit (total supplied per unit = 3 串口线, 3 以太网电缆).
3. Mechanical & Physical:
- Cables should be color-coded (受到推崇的) and have clear directionality markings if pinouts are not symmetric.
4. Electrical / 协议:
UART: 支持常用波特率至少可达 921600 bps. Provide user- configurable UART parameters.
以太网: 至少支持 100 Mbps 操作 (千兆首选). Support common transport protocols (UDP协议, RTSP 用于视频,UDP 用于控制) — specific protocol selection shall be configurable.
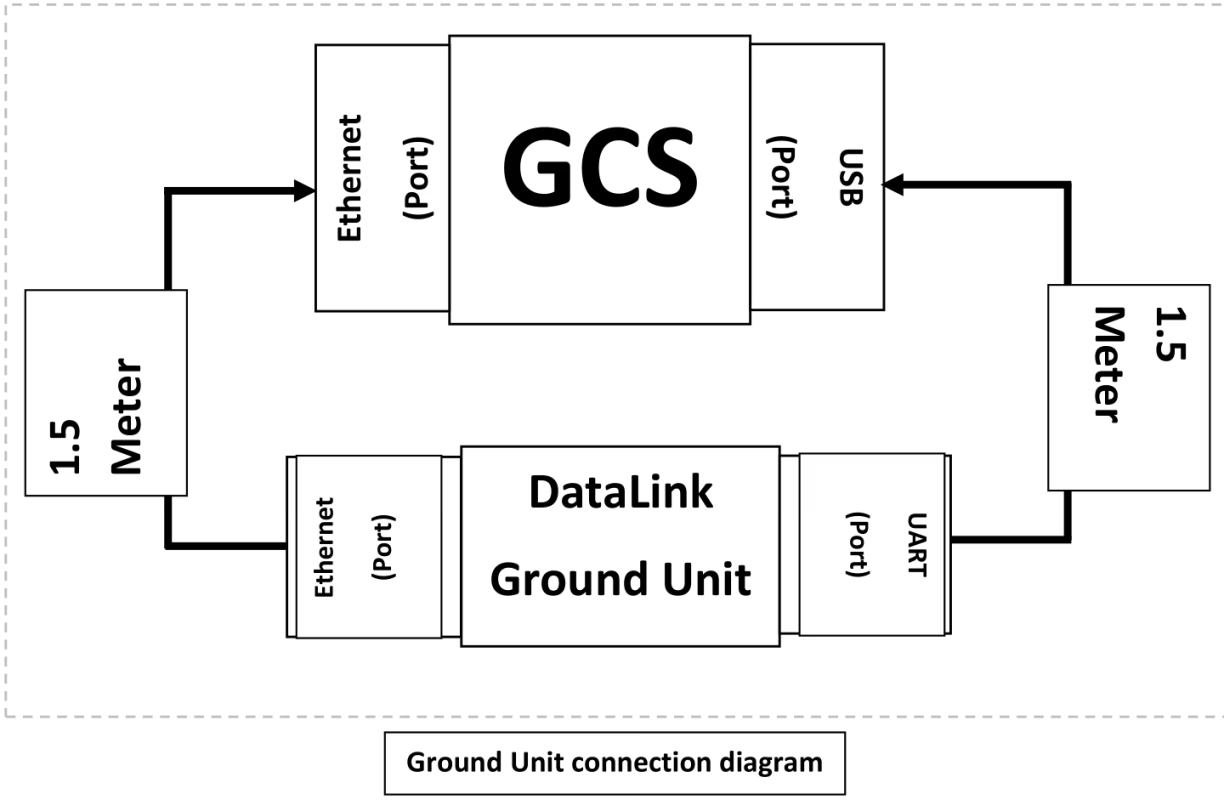
Ground Unit Requirements:
The Ground Unit performs demultiplexing of data from all four Air Units and presents a unified interface to the GCS. Mandatory requirements are:
1. 接口 & 港口 (minimum):
- 1 × 串口 (presented to the GCS). The Ground Unit shall aggregate telemetry streams from all four air units and present them to the GCS as a single UART/USB interface (例如, the Ground Unit UART connected to a USB interface on the GCS).
- 1 × 以太网端口 (presented to the GCS). The Ground Unit shall aggregate camera/video and data streams from the four air units and present them as a single Ethernet interface to the GCS.
2. 聚合行为:
- The Ground Unit shall accept four independent incoming data streams (one from each Air Unit) and demultiplex them to a combined Ethernet stream and a combined serial stream. 来自全球气候系统’ perspective there shall be only one Ethernet link and one UART link to configure and monitor.
- Aggregation must preserve source addressing, so the GCS can identify which stream is from which Bird. The Ground Unit shall not lose per-bird identification information.
3. Cable connectivity (与地面装置一起交付):
- 1 × 串口线 (primary) — length: 400 毫米 (0.4 m). Cable shall allow connection from the Ground Unit UART port to the GCS USB port (if the Ground Unit UART is a direct UART, 提供 USB-UART 适配器电缆). The cable must carry TX, RX, GND and VCC.
- 1 × 以太网电缆 (primary) — length: 400 毫米 (0.4 m). Cable shall be shielded Cat5e/Cat6 patch cable with RJ45 connectors.
- 2 × spare sets — two additional UART and two additional Ethernet cables supplied as spares with the Ground Unit.
4. Electrical / 协议:
- Aggregation shall be transparent with respect to Ethernet frames for video; where needed the Ground Unit may repackage streams into a single transport stream but must preserve timing information and per-bird source identification.
遥测复用: The Ground Unit shall time-multiplex or packetize telemetry streams into a single UART stream with clear framing and optional tags to distinguish messages by bird ID. The protocol used for multiplexing must be documented and supported by the GCS software.
Connectivity & 电缆规格
This section lists the recommended cable and connector specifications to ensure reliable performance in the airborne and ground environments.
- 以太网电缆 (空气装置 -> 摄像机和地面装置 -> GCS): Standard shielded Cat5e or Cat6 patch cables with RJ45 terminations. 使用全屏蔽 (直通车) cable if the installation has high EMI.
- 以太网 长度 (Air 单元): 1.0 m ±5%.
- 以太网 长度 (Ground 单元): 400 毫米±5%.
- 串口线 (空气装置 -> FCC 遥测): 4-导体电缆 (TX, RX, GND, 可选RTS/CTS). 长度: 1.0 m ±5%.
- UART cable (Ground 单元 -> GCS USB/UART): 400 毫米±5% (include USB-UART adapter if required by the GCS).
- 电缆屏蔽和接地: Provide common ground and ensure shielding is terminated at one end per best-practice to avoid ground loops. Use locking RJ45 or latching connectors if vibration is expected.
Provide adapter cables for interfacing Datalink UART to CUAV V5+ telemetry connectors (if the Datalink unit does not natively expose a compatible connector).
- 摄像机支持以太网供电的地方 (PoE) but the Datalink Air Unit does not supply PoE, provide a PoE injector.
功能性 & Protocol Requirements
关键功能要求和建议:
- 每只鸟的识别: 每个数据流 (视频或遥测) MUST be tagged with a unique Bird ID so the GCS can map streams to vehicles.
- Multiplexing Scheme: The Ground Unit shall implement a deterministic multiplexing scheme for telemetry (UART) allowing GCS to parse and route messages by Bird ID.
- Latency 和 吞吐量: The system shall minimize additional aggregation latency.
- Reliability: Ground Unit must handle temporary loss of one or more air units gracefully and continue to present remaining streams to the GCS.
- Configuration Interface: 提供配置方法 (a detailed document) to set Bird IDs, 串口波特率, 和每个流的优先级.
问一个问题
感谢您的回复。 ✨