無人機數據鏈系統概述
這 無人機數據鏈系統 旨在實現可靠的, 即時通訊, 控制, 以及對多架無人機的監控 (無人機). 該系統由四架無人機組成, 每個配備有 數據鏈空中裝置, 一個 飛行控制計算機 (美國聯邦通訊委員會, 例如, 假V5+), 和一個相機/導引頭, 以及一個 資料鏈地面單元 連接到一個 地面控制站 (地面站).
主要特點
- 配置: 1 地面單元與 4 空中裝置透過點對多點雙向鏈路 (乙太網路 + 串口).
- 範圍 & 表現: ≥ 80 公里視距,具有強大的視訊和遙測鏈路, 支援 1080p 視頻 30 fps 和遙測/控制資料高達 921600 基點.
- 介面: 空中單位提供 1 用於 FCC 遙測的 UART 連接埠和 1 用於相機資料的乙太網路端口. 地面單元聚合這些流並向 GCS 提供單一 UART 和乙太網路接口.
- 電纜 & 接線: 直通 TTL UART 連接最大限度地減少延遲和複雜性. 乙太網路電纜支援標準 Cat5e/Cat6 連接,具有 EMI 屏蔽屏蔽.
- 可靠性 & 延遲: 誤碼率 < 8×10⁻⁸, 數據延遲 < 1 多發性硬化症, 丟包 < 1%, 帶前向糾錯, CRC, 和ARQ機制以確保連續運行.
- 系統靈活性: 每個資料流都標有唯一的 Bird ID, 允許 GCS 識別和管理單一無人機. 即使一架或多架無人機暫時失去連接,系統仍會繼續運作.
此數據鏈系統確保無人機之間的無縫集成, 相機, 和地面控制, 提供輕量級, 用於即時多無人機操作的高效能解決方案.
資料鏈路需求文件
該系統由十六個機載資料鏈空中單元組成 (每隻鳥一隻), 單一資料鏈地面單元, 和地面控制站 (地面站). 目的是指定接口, 電纜長度, 連接埠數, 和驗收測試,以便供應商交付的設備能夠與現有 FCC 互通 (飛行控制計算機), 相機 (探索者), 和全球控制系統.
需要一個完整的解決方案來建立資料鏈路 地面 車站 和 4 無人機空中 單位. 系統應能實現可靠的通信, 控制, 同時監控所有無人機. 詳細技術要求如下.
概述:
- 配置: 1 × 地面控制單元 (通用控制單元) 與…溝通 4 × 航空單位 (出)
- 通訊類型: 點對多點雙向鏈路 (乙太網路 + 串口)
- 範圍: ≥ 80 公里視距 (視距)
- 工作頻段: 1.4百萬赫(L波段)
- 調製方案: 時分雙工正交頻分複用 / 四相相移鍵控 / 16-QAM
- 電源需求: 工作電壓 (12V), 當前閾值 (≤2A)
- 溫度範圍: -20°C 至 75°C
數據吞吐量和頻寬:
| 範圍 | 要求 | 筆記 |
| 視訊數據速率 (每個搜尋者) | 5 – 9 Mbps | 1080p@ 30 fps H.264/265 壓縮 |
| 遙測 + 控制 (根據聯邦通訊委員會) | 200 – 300 千比特/秒 | 基於UART的雙向控制數據 |
| 聚合視訊吞吐量 (4 出) | 24 – 36 Mbps | 組合影片上行 |
| 聚合遙測/控制 | 1 Mbps | 與影片相比可以忽略不計 |
| 所需上行鏈路總頻寬 | ≥ 36 Mbps | 和 20% 前向糾錯 + 開銷 ≈ 42 Mbps |
延遲和品質要求:
| 範圍 | 要求 | 筆記 |
| 誤碼率 | < 8×10-8 | 在最大範圍內 |
| 數據延遲 | < 1多發性硬化症 | 即時導引頭操作和資料傳輸所需 |
| 丟包 | < 1% | 帶前向糾錯 + ARQ機制 |
| 糾錯 | 前向糾錯 + CRC + 自動重傳請求 | 遙測可靠度的強制要求 |
鏈路預算 & 射頻參數:
| 範圍 | 目標 價值 | 筆記 |
| 發射功率 (空中單位) | 4 – 5 瓦 | – |
| 發射功率 (地面單位) | 4 – 5 瓦 | – |
| 天線增益 (空中單位) | >3分貝 | 天線方向圖: 各向同性 |
| 天線增益 (地面單位) | 12 – 18 分貝 | 定向天線 |
| 接收靈敏度 | –103dBm @10 MHz | 對於 10⁻⁵ BER |
| 連結邊距@ 80 公里 | > 10 分貝 | 確保穩定的視頻 + 數據鏈路 |
筆記:
- 用於CUAV V5+飛控與週邊設備之間的無縫集成, UART 織布機保持一個至關重要 直接且不複雜的接線結構. 具體來說, 來自 UART 連接埠的織布機應設計為 單直線連接,無需引入任何額外的轉換器或中間板. 這最大限度地減少了潛在的故障點, 減少延遲, 並確保輕量且可靠的佈線架構.
- 另外, 織布機必須以晶體管-電晶體邏輯運行 (TTL) 電壓等級, V5+飛控透過TTL UART進行通信. 與 TTL 的任何偏差 (例如 RS-232 或 RS-485 電平) 需要外部電平轉換器或轉換器, 這與直接織布機的要求相矛盾. 遵守 TTL 標準, 保持訊號相容性, 確保:
- V5+ 和連接的模組之間的直接通信.
- 透過消除轉換器或翻譯器降低硬體複雜性.
- 重量更輕,可靠性更高, 由於訊號路徑中涉及的組件較少.
- 改善訊號完整性, 因為額外的轉換級可能會引入雜訊或時序不匹配.
- 另外, 織布機必須以晶體管-電晶體邏輯運行 (TTL) 電壓等級, V5+飛控透過TTL UART進行通信. 與 TTL 的任何偏差 (例如 RS-232 或 RS-485 電平) 需要外部電平轉換器或轉換器, 這與直接織布機的要求相矛盾. 遵守 TTL 標準, 保持訊號相容性, 確保:
綜上所述,織布機設計應嚴格提供在 TTL 電壓下運作的直通 UART 線束,符合 CUAV V5+ 電氣規格並確保機載應用中的最佳性能.
系統概覽:
進階系統描述:
- 四架無人機, 每個配備:
- 1 × 資料鏈空中裝置
- 1 × 美國聯邦通訊委員會 (飛行控制計算機, 例如, 假V5+)
- 1 × 探索者 / 相機
- 1 × 與地面控制站連接的資料鏈地面單元 (地面站).
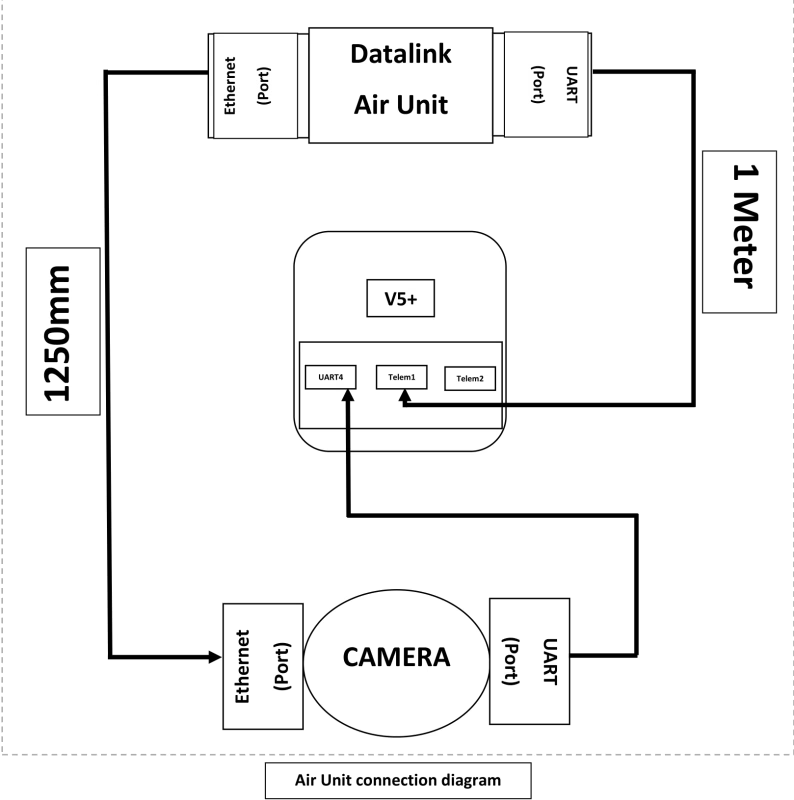
資料流 (概述): 每個攝影機的視訊和感測器資料透過攝影機的乙太網路連接埠提供給其關聯的 Datalink Air Unit. FCC 和空中裝置之間的遙測和控制資料透過 UART 連結傳輸. 資料鏈空中單元透過資料鏈將這些流傳輸到地面單元; 地面單元對流進行解復用並將其作為單一乙太網路流呈現給 GCS (攝影機視訊和數據) 和一個連續劇 (串口/USB) 遙測流.
空氣裝置要求:
每個數據鏈空中單元 (每架無人機一台) 應滿足以下強制性要求:
1. 介面 & 港口 (最低限度):
- 1 × 串口 (最低限度). 此連接埠應用於 FCC 的遙測/控制連接 (遙測埠 Telem1 / Telem2 在 FCC 上的發言).
- 1 × 乙太網路連接埠 (最低限度). 此連接埠用於接收相機/導引頭乙太網路數據.
2. 電纜連接 (與 AirUnit 一起交付):
- 1 × 串口線 (基本的) - 長度: 1.0 米 (±5%). 電纜應攜帶 TX, 接收, 接地和VCC. 電纜的端接必須匹配一端的 Datalink UART 連接器和另一端的 FCC 遙測連接器.
- 1 × 乙太網路電纜 (基本的) - 長度: 1.0 米 (±5%). 電纜應為帶有 RJ45 連接器的標準屏蔽 Cat5e 或 Cat6 跳線.
- 2 × 備用套 (每空氣單位) - IE。, 每個天空單元應提供兩條額外的 UART 電纜和兩條額外的乙太網路電纜 (每單位供應總量 = 3 串口線, 3 乙太網路電纜).
3. 機械的 & 身體的:
- 電纜應採用顏色編碼 (受到推崇的) 如果引腳排列不對稱,則具有清晰的方向性標記.
4. 電力 / 協定:
串口: 支持常用波特率至少可達 921600 基點. 提供用戶- 可配置的UART參數.
乙太網路: 至少支持 100 Mbps 操作 (千兆首選). 支援常用傳輸協定 (UDP協定, RTSP 用於視頻,UDP 用於控制) — 具體協議選擇應是可設定的.
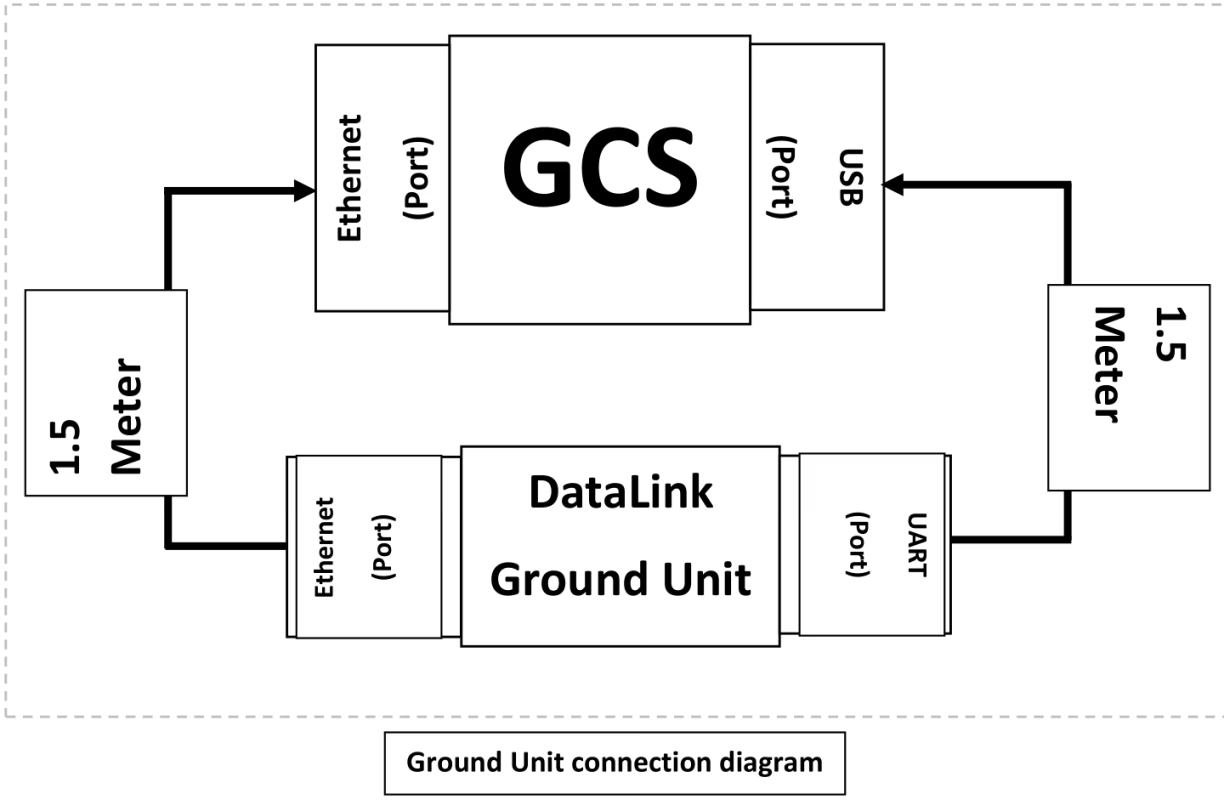
地面單位要求:
地面單元對來自所有四個空中單元的資料進行多路分解,並向 GCS 提供統一的接口. 強制性要求是:
1. 介面 & 港口 (最低限度):
- 1 × 串口 (提交給 GCS). 地面單元應聚合來自所有四個空中單元的遙測流,並將它們作為單一 UART/USB 介面呈現給 GCS (例如, 連接到 GCS 上 USB 連接埠的地面單元 UART).
- 1 × 乙太網路連接埠 (提交給 GCS). 地面單元應聚合來自四個空中單元的攝影機/視訊和資料流,並將它們作為單一乙太網路介面呈現給 GCS.
2. 聚合行為:
- 地面單元應接受四個獨立的輸入資料流 (每個空中單位一名) 並將它們解復用為組合的乙太網路流和組合的串行流. 來自全球氣候系統’ 從角度來看,應該只有一個乙太網路鏈路和一個 UART 鏈路來配置和監控.
- 聚合必須保留來源尋址, 所以 GCS 可以辨識哪個流來自哪隻鳥. 地面單位不得失去每隻鳥的識別訊息.
3. 電纜連接 (與地面裝置一起交付):
- 1 × 串口線 (基本的) - 長度: 400 毫米 (0.4 米). 電纜應允許從地面單元 UART 連接埠連接到 GCS USB 連接埠 (如果地面單元 UART 是直接 UART, 提供 USB-UART 轉接器電纜). 電纜必須帶有 TX, 接收, 接地和VCC.
- 1 × 乙太網路電纜 (基本的) - 長度: 400 毫米 (0.4 米). 電纜應為帶有 RJ45 連接器的屏蔽 Cat5e/Cat6 跳線.
- 2 × 備用套件 — 兩條額外的 UART 和兩條額外的乙太網路電纜作為地面單元的備用零件提供.
4. 電力 / 協定:
- 聚合對於視訊乙太網路幀應是透明的; 如果需要,地面單元可以將流重新打包成單一傳輸流,但必須保留計時資訊和每隻鳥的來源標識.
遙測復用: 地面單元應將遙測流分時復用或打包成單一 UART 流,具有清晰的幀和可選標籤,以透過鳥類 ID 區分訊息. 用於多路復用的協定必須由 GCS 軟體記錄並支援.
連接性 & 電纜規格
本節列出了建議的電纜和連接器規格,以確保在機載和地面環境中提供可靠的性能.
- 乙太網路電纜 (空氣裝置 -> 攝影機和地面裝置 -> 地面站): 帶有 RJ45 端子的標準屏蔽 Cat5e 或 Cat6 跳線. 使用全屏蔽 (直通車) 如果安裝的 EMI 較高,則使用電纜.
- 乙太網路 長度 (空氣 單元): 1.0 米±5%.
- 乙太網路 長度 (地面 單元): 400 毫米±5%.
- 串口線 (空氣裝置 -> FCC 遙測): 4-導體電纜 (TX, 接收, 接地, 可選RTS/CTS). 長度: 1.0 米±5%.
- 串口 電纜 (地面 單元 -> 地面站 USB/串口): 400 毫米±5% (如果 GCS 需要,包括 USB-UART 轉接器).
- 電纜屏蔽和接地: 提供公共接地並確保屏蔽按照最佳實踐在一端終止,以避免接地環路. 如果預計會發生震動,請使用鎖定 RJ45 或閉鎖連接器.
提供轉接器電纜,用於將 Datalink UART 連接到 CUAV V5+ 遙測連接器 (如果資料鏈路單元本身不公開相容連接器).
- 攝影機支援乙太網路供電的地方 (乙太網路供電) 但Datalink天空端不提供PoE, 提供 PoE 注入器.
功能性 & 協議要求
關鍵功能要求和建議:
- 每隻鳥的識別: 每個資料流 (影片或遙測) 必須用唯一的 Bird ID 標記,以便 GCS 可以將流映射到車輛.
- 多路復用 方案: 地面單元應實施確定性的遙測復用方案 (串口) 允許 GCS 透過 Bird ID 解析和路由訊息.
- 延遲 和 吞吐量: 系統應盡量減少額外的聚合延遲.
- 可靠性: 地面部隊必須妥善處理一架或多架空中部隊的暫時損失,並繼續向地面控制系統提供剩餘的資訊流.
- 配置介面: 提供配置方法 (詳細的文件) 設定小鳥 ID, 串口波特率, 和每個流的優先級.
問一個問題
感謝你的回應。 ✨