Системата се състои от шестнадесет въздушни единици за връзка за данни (по една на птица), единично наземно устройство за връзка за данни, и наземна контролна станция (GCS). Целта е да се уточнят интерфейсите, дължини на кабела, броя на портовете, и тестове за приемане, така че единиците, доставени от доставчици, да взаимодействат със съществуващия FCC (компютър за управление на полета), Камери (търсачи), и GCS.
Необходимо е цялостно решение за установяване на връзка за данни между a наземна станция и 4 БПЛА въздушни единици. Системата трябва да позволява надеждна комуникация, контрол, и наблюдение на всички UAV едновременно. Подробни технически изисквания са предоставени по-долу.
Преглед:
∙ Конфигурация: 1 × Наземен контролен блок (GCU) общуване с 4 × Въздушни единици (Извън) ∙ Тип комуникация: Двупосочна връзка от точка към много точки (Ethernet + UART) ∙ диапазон: ≥ 80 km пряка видимост (LOS)
∙ Работна лента: 1.4GHz(L-лента)
∙ Модулационна схема: TDD-ofdm / QPSK / 16-QAM
∙ Изискване за мощност: работно напрежение (12V), Текущ праг (≤2A) ∙ Температурен диапазон: -20°C до 75 °C
Пропускателна способност на данни и честотна лента:
| параметър | Изискване | Бележки |
| Скорост на видео данни (на търсещ) | 5 - 9 Mbps | 1080p @ 30 fps H.264/265 компресия |
| Телеметрия + контрол (според FCC) | 200 - 300 kbps | Базирани на UART двупосочни контролни данни |
| Обща видео пропускателна способност (4 Извън) | 24 - 36 Mbps | Комбинирана видео връзка нагоре |
| Обща телеметрия/контрол | 1 Mbps | Незначително в сравнение с видеото |
| Обща необходима честотна лента на връзката нагоре | ≥ 36 Mbps | с 20% FEC + режийни ≈ 42 Mbps |
Изисквания за латентност и качество:
| параметър | Изискване | Бележки |
| Процент на битови грешки | < 8×10-8 | На максимален обхват |
| Забавяне на данните | < 1г-ца | Изисква се за работа с търсач в реално време и предаване на данни |
| Загуба на пакети | < 1% | С FEC + ARQ механизми |
| Корекция на грешки | FEC + CRC + ARQ | Задължително за надеждността на телеметрията |
Бюджет на връзката & RF параметри:
| параметър | Целева стойност | Бележки |
| Предавателна мощност (Въздушна единица) | 4 – 5 W | – |
| Предавателна мощност (Наземна единица) | 4 – 5 W | – |
| Усилване на антената (Въздушна единица) | >3db | Модел на антената: Изотропен |
| Усилване на антената (Наземна единица) | 12 - 18 db | Насочена антена |
| Чувствителност на приемника | –103dBm при 10 MHz | За 10⁻⁵ BER |
| Марж на връзката @ 80 км | > 10 db | Осигурява стабилно видео + връзка за данни |
Забележка:
⮚ За безпроблемна интеграция между полетния контролер CUAV V5+ и външните периферни устройства, от съществено значение е станкът UART да поддържа a директна и неусложнена структура на окабеляване. Конкретно, тъкачът от UART порта трябва да бъде проектиран като a връзка с една права линия без въвеждане на допълнителни преобразуватели или междинни платки. Това минимизира потенциалните точки на повреда, намалява латентността, и осигурява лека и надеждна архитектура на окабеляване.
⮚ Освен това, станът трябва да работи на Transistor-Transistor Logic (Ttl) нива на напрежение, тъй като полетният контролер V5+ комуникира чрез TTL UART. Всяко отклонение от TTL (като RS-232 или RS-485 нива) би наложило външни превключватели или преобразуватели на ниво, което противоречи на изискването за директен стан. Като се придържаме към TTL стандартите, съвместимостта на сигнала се поддържа, осигуряване:
o Директна комуникация между V5+ и свързаните модули.
o Намалена сложност на хардуера чрез елиминиране на конвертори или транслатори. o По-ниско тегло и подобрена надеждност, тъй като по-малко компоненти участват в пътя на сигнала.
o Подобрена цялост на сигнала, тъй като допълнителните етапи на преобразуване могат да внесат шум или несъответствия във времето.
В заключение, дизайнът на стан трябва стриктно да осигурява прав кабелен сноп UART, работещ при TTL напрежения, привеждане в съответствие с електрическите спецификации на CUAV V5+ и гарантиране на оптимална производителност във въздушни приложения.
Общ преглед на системата:
Описание на системата от високо ниво:
1. Четири БПЛА, всеки оборудван с:
о 1 × Въздушен модул за връзка за данни
о 1 × FCC (Компютър за управление на полета, e.g., НЕВЯРНО V5+)
о 1 × Търсач / Камера
2. 1 × Наземно устройство за връзка за данни, свързано с наземната контролна станция (GCS).
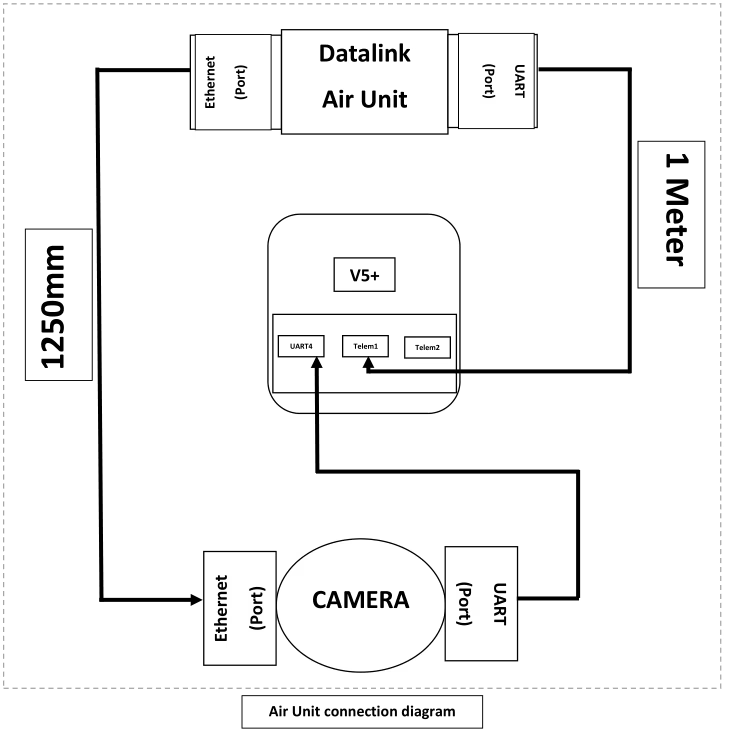
Поток от данни (преглед): Видео и сензорни данни от всяка камера се предоставят на свързания с нея Datalink Air Unit чрез Ethernet порта на камерата. Телеметричните и контролните данни между FCC и Air Unit се пренасят по UART връзка. Datalink Air Unit предава тези потоци по връзката за данни към наземния модул; наземното устройство демултиплексира потоците и ги представя на GCS като единичен Ethernet поток (видео и данни от камерата) и единичен сериал (UART/USB) телеметричен поток.
Изисквания към въздушния блок:
Всеки въздушен модул за връзка за данни (по един на UAV) отговарят на следните задължителни изисквания:
1. Интерфейси & Портове (минимум):
о 1 × UART порт (минимум). Този порт ще се използва за телеметрична/контролна свързаност към FCC (телеметрични портове Telem1 / Telem2 на FCC).
о 1 × Ethernet порт (минимум). Този порт ще се използва за получаване на Ethernet данни от камера/търсач.
2. Кабелна връзка (доставени с Air Unit):
о 1 × UART кабел (първичен) — дължина: 1.0 m (± 5%). Кабелът трябва да носи TX, RX, GND и VCC. Кабелът трябва да бъде прекратен, за да съответства на съединителя Datalink UART от единия край и съединителя за телеметрия на FCC от другия.
о 1 × Ethernet кабел (първичен) — дължина: 1.0 m (± 5%). Кабелът трябва да бъде стандартен екраниран кабел Cat5e или Cat6 с RJ45 съединители.
о 2 × резервни комплекти (на въздушна единица) — т.е., два допълнителни UART кабела и два допълнителни Ethernet кабела ще бъдат доставени с всеки Air Unit (общо доставено за единица = 3 UART кабела, 3 Ethernet кабели).
3. Механични & Физически:
o Кабелите трябва да бъдат цветно кодирани (препоръчително) и имат ясни маркировки за насоченост, ако изводите не са симетрични.
4. Електрически/Протокол:
о UART: Поддържайте общи скорости на предаване поне до 921600 bps. Осигурете конфигурируеми от потребителя UART параметри.
о Ethernet: Подкрепете поне 100 Mbps работа (Предпочита се Gigabit). Поддръжка на общи транспортни протоколи (UDP, RTSP за видео и UDP за контрол) — конкретен избор на протокол трябва да може да се конфигурира.
Изисквания към наземния модул:
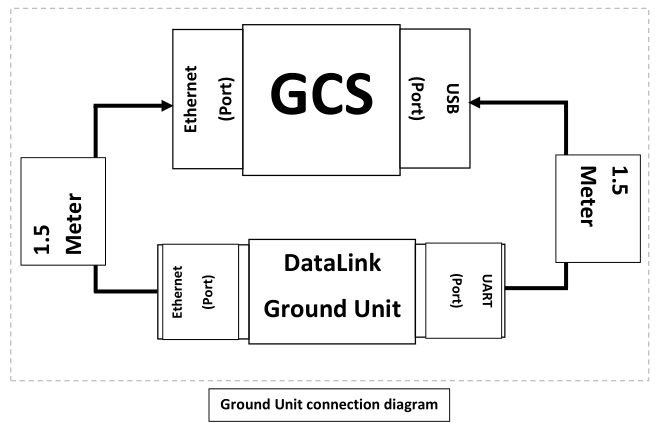
Наземното устройство извършва демултиплексиране на данни от четирите въздушни устройства и представя унифициран интерфейс към GCS. Задължителните изисквания са:
1. Интерфейси & Портове (минимум):
о 1 × UART порт (представени на GCS). Наземното устройство събира телеметрични потоци от всичките четири въздушни устройства и ги представя на GCS като един UART/USB интерфейс (e.g., UART на наземния модул, свързан към USB интерфейс на GCS).
о 1 × Ethernet порт (представени на GCS). Наземният модул събира камера/видео и потоци от данни от четирите въздушни блока и ги представя като единен Ethernet интерфейс към GCS.
2. Агрегационно поведение:
o Наземното устройство приема четири независими входящи потока от данни (по един от всяка въздушна единица) и ги демултиплексирайте до комбиниран Ethernet поток и комбиниран сериен поток. От GCS’ от перспектива ще има само една Ethernet връзка и една UART връзка за конфигуриране и наблюдение.
o Агрегирането трябва да запази адресирането на източника, така че GCS може да идентифицира кой поток е от коя Bird. Наземният модул не трябва да губи идентификационна информация за всяка птица.
3. Кабелна връзка (доставен с наземния модул):
о 1 × UART кабел (първичен) — дължина: 400 mm (0.4 m). Кабелът трябва да позволява връзка от UART порта на наземния модул към USB порта на GCS (ако UART на наземния модул е директен UART, осигурете адаптерен кабел USB-UART). Кабелът трябва да носи TX, RX, GND и VCC.
о 1 × Ethernet кабел (първичен) — дължина: 400 mm (0.4 m). Кабелът трябва да бъде екраниран съединителен кабел Cat5e/Cat6 с конектори RJ45.
о 2 × резервни комплекти — два допълнителни UART и два допълнителни Ethernet кабела, доставени като резервни със заземяващото устройство.
4. Електрически/Протокол:
o Агрегирането трябва да бъде прозрачно по отношение на Ethernet рамки за видео; когато е необходимо, наземният модул може да преопакова потоците в един транспортен поток, но трябва да запази информацията за времето и идентификацията на източника за всяка птица.
о Телеметрично мултиплексиране: Наземният модул мултиплексира във времето или пакетира телеметрични потоци в единичен UART поток с ясно рамкиране и незадължителни етикети за разграничаване на съобщенията по идентификатор на птица. Протоколът, използван за мултиплексиране, трябва да бъде документиран и поддържан от софтуера GCS.
Свързаност & Спецификации на кабела
Този раздел изброява препоръчителните спецификации на кабела и конектора, за да се осигури надеждна работа във въздуха и на земята.
1. Ethernet кабели (въздушна единица -> Камера и наземно устройство -> GCS): Стандартни екранирани съединителни кабели Cat5e или Cat6 с накрайници RJ45. Използвайте напълно защитен (STP) кабел, ако инсталацията има висок EMI.
2. Ethernet дължина (Въздушна единица): 1.0 m ±5%.
3. Ethernet дължина (Наземна единица): 400 mm ±5%.
4. UART кабели (въздушна единица -> FCC телеметрия): 4-проводников кабел (TX, RX, GND, по избор RTS/CTS). дължина: 1.0 m ±5%.
5. UART кабел (Наземен модул -> GCS USB/UART): 400 mm ±5% (включете USB-UART адаптер, ако се изисква от GCS).
6. Екраниране и заземяване на кабели: Осигурете общо заземяване и се уверете, че екранирането е прекратено в единия край според най-добрата практика, за да избегнете заземяване. Използвайте заключващи RJ45 или фиксиращи конектори, ако се очакват вибрации.
7. Осигурете адаптерни кабели за свързване на Datalink UART към CUAV V5+ телеметрични конектори (ако модулът Datalink не излага първоначално съвместим конектор).
8. Когато камерата поддържа Power-over-Ethernet (PoE) но Datalink Air Unit не предоставя PoE, осигурете PoE инжектор.
Функционални & Изисквания към протокола
Основни функционални изисквания и препоръки:
1. Идентификация на птица: Всеки поток от данни (видео или телеметрия) ТРЯБВА да бъде маркиран с уникален идентификатор на птица, така че GCS да може да картографира потоци към превозни средства.
2. Схема за мултиплексиране: Наземният блок прилага детерминирана мултиплексна схема за телеметрия (UART) позволявайки на GCS да анализира и насочва съобщенията по Bird ID. 3. Латентност и пропускателна способност: Системата минимизира допълнителната латентност на агрегирането. 4. Надеждност: Наземният модул трябва да се справи с временната загуба на една или повече въздушни единици елегантно и да продължи да представя оставащите потоци на GCS.
5. Интерфейс за конфигурация: Осигурете метод за конфигуриране (подробен документ) за задаване на идентификатори на птици, UART скорости на предаване, и приоритети на поток.
Задайте въпрос
Вашето съобщение е изпратено