このシステムは 16 基の空中データリンク航空ユニットで構成されています (一羽につき一羽), a single Datalink Ground Unit, および地上管制局 (GCS). 目的はインターフェースを指定することです, ケーブルの長さ, port counts, and acceptance tests so that units delivered by suppliers will interoperate with the existing FCC (飛行制御コンピュータ), カメラ (探求者), and the GCS.
間のデータリンクを確立するには、完全なソリューションが必要です。 ground station そして 4 UAV air units. システムは信頼性の高い通信を可能にする必要があります, コントロール, and monitoring of all UAVs simultaneously. Detailed technical requirements are provided below.
概要:
∙ 構成: 1 × 地上管制装置 (GCU) と通信する 4 × 航空ユニット (のうち) ∙ 通信タイプ: ポイントツーマルチポイント双方向リンク (イーサネット + UART) ∙ 範囲: ≥ 80 km 見通し (ロス)
∙ 動作帯域: 1.4GHz(Lバンド)
∙ 変調方式: TDD-OFDM / QPSK / 16-QAM
∙ 電力要件: 動作電圧 (12V), 現在のしきい値 (≤2A) ∙ 温度範囲: -20℃~75℃
データスループットと帯域幅:
| パラメータ | 要件 | 注意事項 |
| ビデオデータレート (求道者ごとに) | 5 – 9 Mbps | 1080p@ 30 fps H.264/265 compression |
| テレメトリー + コントロール (FCCによる) | 200 – 300 kbps | UARTベースの双方向制御データ |
| 総ビデオ スループット (4 のうち) | 24 – 36 Mbps | 結合ビデオアップリンク |
| 集約テレメトリー/制御 | 1 Mbps | 動画に比べれば微々たるもの |
| 必要なアップリンク帯域幅の合計 | ≥ 36 Mbps | と 20% FEC + オーバーヘッド ≈ 42 Mbps |
レイテンシーと品質の要件:
| パラメータ | 要件 | 注意事項 |
| ビットエラー率 | < 8×10-8 | 最大射程時 |
| データ遅延 | < 1MS | Required for real-time seeker operation and data transmission |
| パケットロス | < 1% | FECあり + ARQ メカニズム |
| エラー訂正 | FEC + CRC + ARQ | テレメトリーの信頼性のために必須 |
リンクバジェット & RFパラメータ:
| パラメータ | Target Value | 注意事項 |
| 送信電力 (航空ユニット) | 4 – 5 W | – |
| 送信電力 (地上ユニット) | 4 – 5 W | – |
| アンテナ利得 (航空ユニット) | >3dB | アンテナパターン: 等方性 |
| アンテナ利得 (地上ユニット) | 12 – 18 dB | 指向性アンテナ |
| 受信感度 | –103dBm @ 10 MHz | 10⁻⁵ BER の場合 |
| リンクマージン@ 80 km | > 10 dB | 堅牢なビデオを保証 + データリンク |
注記:
⮚ For seamless integration between the CUAV V5+ flight controller and external peripherals, UART 織機が direct and uncomplicated wiring structure. 具体的には, UART ポートからの織機は、 single straight line connection without introducing any additional converters or intermediary boards. これにより、潜在的な障害点が最小限に抑えられます, レイテンシを短縮します, and ensures a lightweight and reliable wiring architecture.
⮚ Furthermore, 織機はトランジスタ - トランジスタ ロジックで動作する必要があります (TTL) voltage levels, V5+ フライト コントローラーは TTL UART 経由で通信するため. TTLからの逸脱 (RS-232 または RS-485 レベルなど) would necessitate external level shifters or converters, これは直接織機の要件に反します。. By adhering to TTL standards, 信号の互換性は維持されます, 確保する:
o Direct communication between the V5+ and connected modules.
o Reduced hardware complexity by eliminating converters or translators. o Lower weight and improved reliability, as fewer components are involved in the signal path.
o Improved signal integrity, since additional conversion stages can introduce noise or timing mismatches.
結論は, the loom design should strictly provide a straight-through UART wiring harness operating at TTL voltages, aligning with the CUAV V5+ electrical specifications and guaranteeing optimal performance in airborne applications.
システム概要:
システムの概要説明:
1. 4 機の UAV, それぞれに装備されている:
o 1 × データリンク航空ユニット
o 1 × FCC (飛行制御コンピュータ, 例えば, 偽 V5+)
o 1 × シーカー / カメラ
2. 1 × 地上管制局に接続されたデータリンク地上ユニット (GCS).
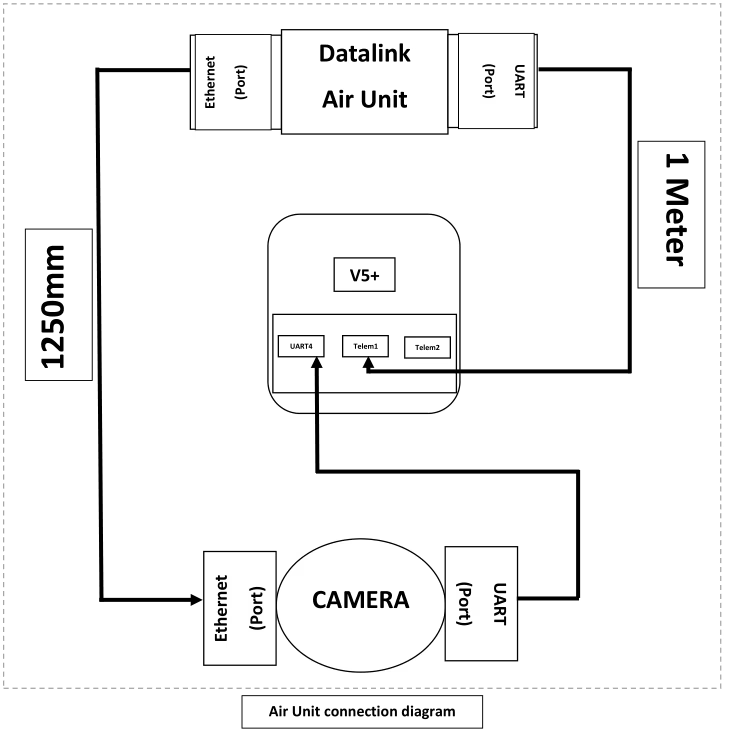
データの流れ (概要): Video and sensor data from each camera is provided to its associated Datalink Air Unit via the camera’s Ethernet port. Telemetry and control data between the FCC and the Air Unit is carried over a UART link. The Datalink Air Unit transmits these streams over the data link to the Ground Unit; the Ground Unit demultiplexes the streams and presents them to the GCS as a single Ethernet stream (カメラのビデオとデータ) そしてシングルシリアル (UART/USB) telemetry stream.
航空ユニットの要件:
各データリンク航空ユニット (UAVごとに1つ) 以下の必須要件を満たさなければなりません:
1. インターフェース & ポート (最小):
o 1 × UARTポート (最小). This port shall be used for telemetry/control connectivity to the FCC (テレメトリ ポート Telem1 / FCC の Telem2).
o 1 × イーサネットポート (最小). This port shall be used to receive camera/seeker Ethernet data.
2. ケーブル接続 (delivered with the Air Unit):
o 1 ×UARTケーブル (主要な) - 長さ: 1.0 メートル (±5%). ケーブルはTXを伝送する必要があります, RX, GND and VCC. Cable must be terminated to match the Datalink UART connector on one end and the FCC telemetry connector on the other.
o 1 × イーサネットケーブル (主要な) - 長さ: 1.0 メートル (±5%). Cable shall be standard shielded Cat5e or Cat6 patch cable with RJ45 connectors.
o 2 × スペアセット (航空ユニットあたり) — つまり, two additional UART cables and two additional Ethernet cables shall be supplied with each Air Unit (total supplied per unit = 3 UART cables, 3 イーサネットケーブル).
3. 機械式 & 物理的な:
o Cables should be color-coded (推奨) and have clear directionality markings if pinouts are not symmetric.
4. Electrical/Protocol:
o UART: 少なくとも最大で一般的なボーレートをサポート 921600 bps. Provide user configurable UART parameters.
o イーサネット: 少なくともサポートする 100 Mbps動作 (ギガビットが好ましい). Support common transport protocols (UDP, ビデオ用の RTSP と制御用の UDP) — specific protocol selection shall be configurable.
地上ユニットの要件:
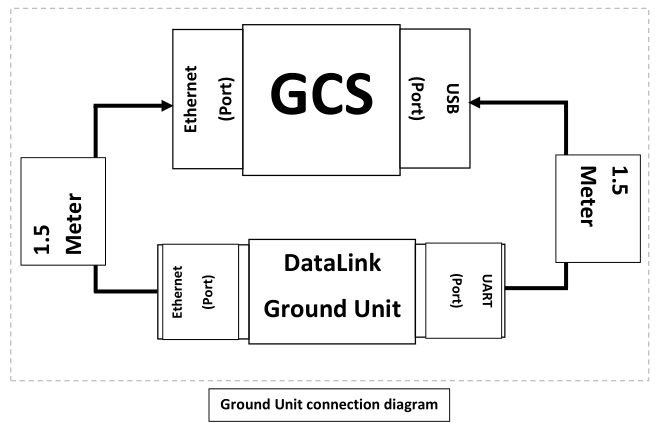
The Ground Unit performs demultiplexing of data from all four Air Units and presents a unified interface to the GCS. 必須要件は、:
1. インターフェース & ポート (最小):
o 1 × UARTポート (GCSに提出). The Ground Unit shall aggregate telemetry streams from all four air units and present them to the GCS as a single UART/USB interface (例えば, GCS の USB インターフェイスに接続された地上ユニット UART).
o 1 × イーサネットポート (GCSに提出). The Ground Unit shall aggregate camera/video and data streams from the four air units and present them as a single Ethernet interface to the GCS.
2. 集約動作:
o The Ground Unit shall accept four independent incoming data streams (one from each Air Unit) and demultiplex them to a combined Ethernet stream and a combined serial stream. GCSから’ perspective there shall be only one Ethernet link and one UART link to configure and monitor.
o Aggregation must preserve source addressing, so the GCS can identify which stream is from which Bird. The Ground Unit shall not lose per-bird identification information.
3. ケーブル接続 (地上ユニットに付属):
o 1 ×UARTケーブル (主要な) - 長さ: 400 mm (0.4 メートル). Cable shall allow connection from the Ground Unit UART port to the GCS USB port (if the Ground Unit UART is a direct UART, USB-UARTアダプターケーブルを提供します). The cable must carry TX, RX, GND and VCC.
o 1 × イーサネットケーブル (主要な) - 長さ: 400 mm (0.4 メートル). Cable shall be shielded Cat5e/Cat6 patch cable with RJ45 connectors.
o 2 × spare sets — two additional UART and two additional Ethernet cables supplied as spares with the Ground Unit.
4. Electrical/Protocol:
o Aggregation shall be transparent with respect to Ethernet frames for video; where needed the Ground Unit may repackage streams into a single transport stream but must preserve timing information and per-bird source identification.
o テレメトリ多重化: The Ground Unit shall time-multiplex or packetize telemetry streams into a single UART stream with clear framing and optional tags to distinguish messages by bird ID. The protocol used for multiplexing must be documented and supported by the GCS software.
接続性 & ケーブル仕様
This section lists the recommended cable and connector specifications to ensure reliable performance in the airborne and ground environments.
1. イーサネットケーブル (航空ユニット -> カメラおよび地上ユニット -> GCS): Standard shielded Cat5e or Cat6 patch cables with RJ45 terminations. 完全にシールドされた状態で使用してください (STP) cable if the installation has high EMI.
2. Ethernet length (航空ユニット): 1.0 m ±5%.
3. Ethernet length (地上ユニット): 400 mm ±5%.
4. UARTケーブル (航空ユニット -> FCCテレメトリ): 4-導体ケーブル (テキサス州, RX, GND, オプションの RTS/CTS). 長さ: 1.0 m ±5%.
5. UART cable (Ground Unit -> GCS USB/UART): 400 mm±5% (include USB-UART adapter if required by the GCS).
6. ケーブルのシールドとアース: Provide common ground and ensure shielding is terminated at one end per best-practice to avoid ground loops. Use locking RJ45 or latching connectors if vibration is expected.
7. データリンク UART を CUAV V5+ テレメトリ コネクタに接続するためのアダプタ ケーブルを提供します (データリンク ユニットが互換性のあるコネクタをネイティブに公開していない場合).
8. カメラが Power-over-Ethernet をサポートしている場所 (PoE) but the Datalink Air Unit does not supply PoE, provide a PoE injector.
機能的 & プロトコル要件
主要な機能要件と推奨事項:
1. 鳥ごとの識別: 各データストリーム (ビデオまたはテレメトリー) MUST be tagged with a unique Bird ID so the GCS can map streams to vehicles.
2. Multiplexing Scheme: The Ground Unit shall implement a deterministic multiplexing scheme for telemetry (UART) allowing GCS to parse and route messages by Bird ID. 3. Latency and Throughput: The system shall minimize additional aggregation latency. 4. 信頼性: Ground Unit must handle temporary loss of one or more air units gracefully and continue to present remaining streams to the GCS.
5. 設定インターフェース: 設定方法を提供する (詳細な文書) to set Bird IDs, UARTのボーレート, ストリームごとの優先順位.
質問する
ご回答をありがとうございました。 ✨