ระบบประกอบด้วยหน่วยอากาศ Datalink Air จำนวน 16 หน่วย (หนึ่งตัวต่อนก), หน่วยกราวด์ดาต้าลิงค์เดียว, และสถานีควบคุมภาคพื้นดิน (กศน). มีวัตถุประสงค์เพื่อระบุอินเทอร์เฟซ, ความยาวสายเคเบิล, นับพอร์ต, และการทดสอบการยอมรับเพื่อให้หน่วยที่จัดส่งโดยซัพพลายเออร์สามารถทำงานร่วมกับ FCC ที่มีอยู่ได้ (คอมพิวเตอร์ควบคุมการบิน), กล้อง (ผู้แสวงหา), และ สอศ.
จำเป็นต้องมีโซลูชั่นที่สมบูรณ์เพื่อสร้างการเชื่อมโยงข้อมูลระหว่าง สถานีภาคพื้นดิน และ 4 หน่วยอากาศ UAV. ระบบควรเปิดใช้งานการสื่อสารที่เชื่อถือได้, ควบคุม, และการติดตาม UAV ทั้งหมดพร้อมกัน. ข้อกำหนดทางเทคนิคโดยละเอียดมีดังต่อไปนี้
ภาพรวม:
∙ การกำหนดค่า: 1 × หน่วยควบคุมภาคพื้นดิน (มช) กำลังสื่อสารกับ 4 × หน่วยอากาศ (ออกจาก) ∙ ประเภทการสื่อสาร: ลิงก์สองทิศทางแบบจุดต่อหลายจุด (อีเทอร์เน็ต + UART) ∙ พิสัย: ≥ 80 แนวสายตา กม (เดอะ)
∙ วงปฏิบัติการ: 1.4GHz(L-แบนด์)
∙ โครงการมอดูเลต: tdd-ofdm / QPSK / 16-QAM
∙ ความต้องการพลังงาน: แรงดันไฟฟ้าปฏิบัติการ (12วี), เกณฑ์ปัจจุบัน (≤2A) ∙ ช่วงอุณหภูมิ: -20°ซ ถึง 75°ซ
ปริมาณข้อมูลและแบนด์วิธ:
| พารามิเตอร์ | ความต้องการ | หมายเหตุ |
| อัตราข้อมูลวิดีโอ (ต่อผู้ขอ) | 5 - 9 Mbps | 1080พี @ 30 การบีบอัดภาพต่อวินาที H.264/265 |
| การวัดและส่งข้อมูลทางไกล + ควบคุม (ต่อ FCC) | 200 - 300 kbps | ข้อมูลการควบคุมแบบสองทิศทางที่ใช้ UART |
| รวมปริมาณงานวิดีโอ (4 ออกจาก) | 24 - 36 Mbps | อัปลิงค์วิดีโอแบบรวม |
| การวัด/การควบคุมทางไกลรวม | 1 Mbps | เล็กน้อยเมื่อเทียบกับวิดีโอ |
| แบนด์วิดท์อัปลิงค์ที่จำเป็นทั้งหมด | ≥ 36 Mbps | กับ 20% FEC + เหนือศีรษะ data 42 Mbps |
ข้อกำหนดด้านเวลาแฝงและคุณภาพ:
| พารามิเตอร์ | ความต้องการ | หมายเหตุ |
| อัตราข้อผิดพลาดบิต | < 8×10-8 | ที่ช่วงสูงสุด |
| ข้อมูลล่าช้า | < 1นางสาว | จำเป็นสำหรับการดำเนินการค้นหาแบบเรียลไทม์และการส่งข้อมูล |
| การสูญเสียแพ็คเก็ต | < 1% | ด้วย FEC + กลไก ARQ |
| การแก้ไขข้อผิดพลาด | FEC + ซีอาร์ซี + ARQ | จำเป็นสำหรับความน่าเชื่อถือของการวัดและส่งข้อมูลทางไกล |
ลิงค์งบประมาณ & พารามิเตอร์คลื่นความถี่วิทยุ:
| พารามิเตอร์ | มูลค่าเป้าหมาย | หมายเหตุ |
| ส่งกำลัง (หน่วยอากาศ) | 4 – 5 W | – |
| ส่งกำลัง (หน่วยภาคพื้นดิน) | 4 – 5 W | – |
| การได้รับเสาอากาศ (หน่วยอากาศ) | >3เดซิเบล | รูปแบบเสาอากาศ: ไอโซโทรปิก |
| การได้รับเสาอากาศ (หน่วยภาคพื้นดิน) | 12 - 18 เดซิเบล | เสาอากาศทิศทาง |
| ความไวของผู้รับ | –103dBm @ 10 เมกะเฮิรตซ์ | สำหรับ 10⁻⁵ BER |
| ระยะขอบลิงค์ @ 80 กม. | > 10 เดซิเบล | รับประกันวิดีโอที่แข็งแกร่ง + ลิงค์ข้อมูล |
บันทึก:
⮚ สำหรับการบูรณาการอย่างราบรื่นระหว่างตัวควบคุมการบิน CUAV V5+ และอุปกรณ์ต่อพ่วงภายนอก, มันเป็นสิ่งสำคัญที่เครื่องทอผ้า UART จะดูแลรักษา โครงสร้างสายไฟโดยตรงและไม่ซับซ้อน. โดยเฉพาะ, เครื่องทอจากพอร์ต UART ควรได้รับการออกแบบให้เป็น การเชื่อมต่อแบบเส้นตรงเดียวโดยไม่ต้องมีตัวแปลงหรือบอร์ดตัวกลางเพิ่มเติม. ซึ่งจะช่วยลดจุดที่อาจเกิดความล้มเหลวให้เหลือน้อยที่สุด, ลดความล่าช้า, และรับประกันสถาปัตยกรรมการเดินสายที่มีน้ำหนักเบาและเชื่อถือได้
⮚ นอกจากนี้, เครื่องทอจะต้องทำงานที่ทรานซิสเตอร์-ทรานซิสเตอร์ลอจิก (ทีทีแอล) ระดับแรงดันไฟฟ้า, เนื่องจากตัวควบคุมการบิน V5+ สื่อสารผ่าน TTL UART. การเบี่ยงเบนใด ๆ จาก TTL (เช่น RS-232 หรือ RS-485) จะจำเป็นต้องมีตัวจำแลงหรือตัวแปลงระดับภายนอก, ซึ่งขัดแย้งกับความต้องการของเครื่องทอผ้าโดยตรง. โดยยึดถือมาตรฐาน TTL, ความเข้ากันได้ของสัญญาณยังคงอยู่, มั่นใจ:
o การสื่อสารโดยตรงระหว่าง V5+ และโมดูลที่เชื่อมต่อ
o ลดความซับซ้อนของฮาร์ดแวร์โดยกำจัดตัวแปลงหรือนักแปล. o น้ำหนักที่ลดลงและความน่าเชื่อถือที่ดีขึ้น, เนื่องจากมีส่วนประกอบน้อยลงในเส้นทางสัญญาณ.
o ปรับปรุงความสมบูรณ์ของสัญญาณ, เนื่องจากขั้นตอน Conversion เพิ่มเติมอาจทำให้เกิดสัญญาณรบกวนหรือจังหวะเวลาที่ไม่ตรงกันได้.
สรุปแล้ว, การออกแบบเครื่องทอผ้าควรจัดให้มีชุดสายไฟ UART แบบตรงที่ทำงานที่แรงดันไฟฟ้า TTL อย่างเคร่งครัด, สอดคล้องกับข้อกำหนดทางไฟฟ้า CUAV V5+ และรับประกันประสิทธิภาพสูงสุดในการใช้งานทางอากาศ.
ภาพรวมของระบบ:
คำอธิบายระบบระดับสูง:
1. UAV สี่ลำ, แต่ละอันมีอุปกรณ์ครบครัน:
โอ 1 × หน่วยอากาศดาต้าลิงค์
โอ 1 × เอฟซีซี (คอมพิวเตอร์ควบคุมการบิน, เช่น, เท็จ V5+)
โอ 1 × ผู้แสวงหา / กล้อง
2. 1 × Datalink Ground Unit เชื่อมต่อกับสถานีควบคุมภาคพื้นดิน (กศน).
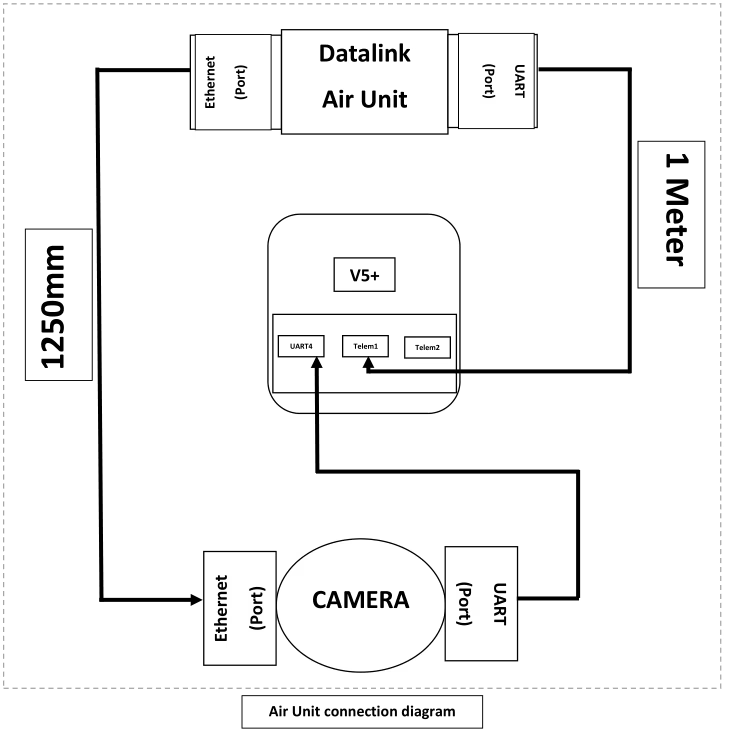
การไหลของข้อมูล (ภาพรวม): ข้อมูลวิดีโอและเซ็นเซอร์จากกล้องแต่ละตัวจะถูกส่งไปยัง Datalink Air Unit ที่เกี่ยวข้องผ่านทางพอร์ตอีเธอร์เน็ตของกล้อง. ข้อมูลการวัดและส่งข้อมูลทางไกลและการควบคุมระหว่าง FCC และ Air Unit จะถูกส่งผ่านลิงก์ UART. หน่วยอากาศ Datalink จะส่งกระแสข้อมูลเหล่านี้ผ่านดาต้าลิงค์ไปยังหน่วยภาคพื้นดิน; หน่วยภาคพื้นดินจะดีมัลติเพล็กซ์ของสตรีมและนำเสนอต่อ GCS ในรูปแบบสตรีมอีเทอร์เน็ตเดียว (วิดีโอและข้อมูลของกล้อง) และซีรีย์เรื่องเดียว (UART/ยูเอสบี) กระแสข้อมูลทางไกล
ข้อกำหนดหน่วยอากาศ:
แต่ละหน่วยอากาศดาต้าลิงค์ (หนึ่งอันต่อ UAV) จะต้องเป็นไปตามข้อกำหนดบังคับดังต่อไปนี้:
1. การเชื่อมต่อ & พอร์ต (ขั้นต่ำ):
โอ 1 × พอร์ต UART (ขั้นต่ำ). พอร์ตนี้จะใช้สำหรับการเชื่อมต่อการวัดและส่งข้อมูลทางไกล/การควบคุมกับ FCC (พอร์ตมาตรระยะไกล Telem1 / Telem2 บน FCC).
โอ 1 × พอร์ตอีเธอร์เน็ต (ขั้นต่ำ). พอร์ตนี้จะใช้เพื่อรับข้อมูลอีเธอร์เน็ตของกล้อง/ผู้ค้นหา
2. การเชื่อมต่อสายเคเบิล (จัดส่งพร้อมกับหน่วยอากาศ):
โอ 1 × สาย UART (หลัก) - ความยาว: 1.0 ม (±5%). สายเคเบิลจะต้องมี TX, รับ, GND และ VCC. ต้องยุติสายเคเบิลเพื่อให้ตรงกับขั้วต่อ Datalink UART ที่ปลายด้านหนึ่งและขั้วต่อการวัดและส่งข้อมูลทางไกลของ FCC ที่อีกด้านหนึ่ง
โอ 1 × สายอีเทอร์เน็ต (หลัก) - ความยาว: 1.0 ม (±5%). สายเคเบิลต้องเป็นสายแพทช์ Cat5e หรือ Cat6 ที่มีฉนวนหุ้มมาตรฐานพร้อมขั้วต่อ RJ45
โอ 2 × ชุดอะไหล่ (ต่อหน่วยอากาศ) - เช่น., จะต้องจัดหาสาย UART เพิ่มเติมสองเส้นและสายอีเทอร์เน็ตเพิ่มเติมสองเส้นให้กับ Air Unit แต่ละเครื่อง (จำนวนที่ให้มาทั้งหมดต่อหน่วย = สายเคเบิล UART 3 เส้น, 3 สายอีเธอร์เน็ต).
3. เครื่องกล & ทางกายภาพ:
o สายเคเบิลควรมีรหัสสี (ที่แนะนำ) และมีเครื่องหมายทิศทางที่ชัดเจนหาก pinouts ไม่สมมาตร
4. ไฟฟ้า/โปรโตคอล:
โอ UART: รองรับอัตรารับส่งข้อมูลทั่วไปสูงสุดเป็นอย่างน้อย 921600 ต่อวินาที. จัดเตรียมพารามิเตอร์ UART ที่ผู้ใช้สามารถกำหนดค่าได้.
โอ อีเทอร์เน็ต: อย่างน้อยก็สนับสนุน 100 การทำงานของเมกะบิตต่อวินาที (ต้องการกิกะบิต). รองรับโปรโตคอลการขนส่งทั่วไป (UDP, RTSP สำหรับวิดีโอและ UDP สำหรับการควบคุม) — การเลือกโปรโตคอลเฉพาะจะต้องสามารถกำหนดค่าได้
ข้อกำหนดของหน่วยภาคพื้นดิน:
หน่วยภาคพื้นดินดำเนินการแยกข้อมูลจากหน่วยอากาศทั้งสี่หน่วยและนำเสนออินเทอร์เฟซแบบรวมไปยัง GCS. ข้อกำหนดบังคับคือ:
1. การเชื่อมต่อ & พอร์ต (ขั้นต่ำ):
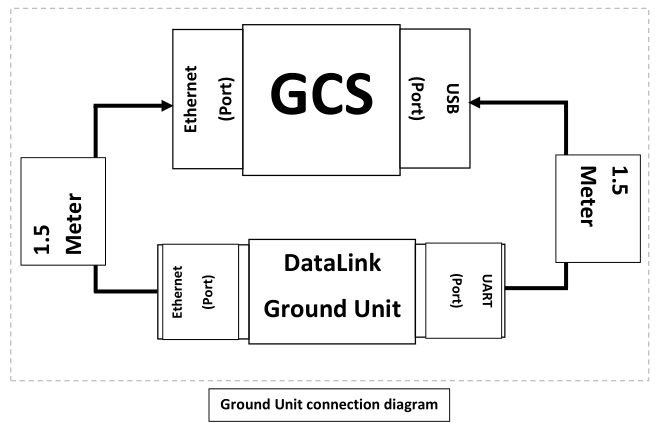
โอ 1 × พอร์ต UART (นำเสนอต่อ กคส). หน่วยภาคพื้นดินจะรวมกระแสข้อมูลโทรมาตรจากหน่วยอากาศทั้งสี่และนำเสนอต่อ GCS เป็นอินเทอร์เฟซ UART/USB เดียว (เช่น, Ground Unit UART เชื่อมต่อกับอินเทอร์เฟซ USB บน GCS).
โอ 1 × พอร์ตอีเธอร์เน็ต (นำเสนอต่อ กคส). หน่วยภาคพื้นดินจะรวมกล้อง/วิดีโอ และสตรีมข้อมูลจากหน่วยอากาศทั้งสี่และนำเสนอเป็นอินเทอร์เฟซอีเทอร์เน็ตเดียวกับ GCS
2. พฤติกรรมการรวมกลุ่ม:
o หน่วยภาคพื้นดินจะยอมรับสตรีมข้อมูลขาเข้าที่เป็นอิสระสี่รายการ (หนึ่งอันจากแต่ละหน่วยอากาศ) และดีมัลติเพล็กซ์ไปยังสตรีมอีเธอร์เน็ตรวมและสตรีมอนุกรมรวม. จาก สพฐ’ มุมมองจะต้องมีลิงค์อีเธอร์เน็ตเพียงลิงค์เดียวและลิงค์ UART หนึ่งลิงค์เพื่อกำหนดค่าและตรวจสอบ
o การรวมกลุ่มจะต้องรักษาที่อยู่ของแหล่งที่มา, เพื่อให้ GCS สามารถระบุได้ว่ากระแสใดมาจากนกตัวใด. หน่วยภาคพื้นดินจะไม่สูญเสียข้อมูลประจำตัวของนกต่อตัว
3. การเชื่อมต่อสายเคเบิล (จัดส่งพร้อมหน่วยภาคพื้นดิน):
โอ 1 × สาย UART (หลัก) - ความยาว: 400 มม (0.4 ม). สายเคเบิลจะต้องอนุญาตการเชื่อมต่อจากพอร์ต Ground Unit UART ไปยังพอร์ต GCS USB (หาก Ground Unit UART เป็น UART โดยตรง, ให้สายอะแดปเตอร์ USB-UART). สายเคเบิลต้องมี TX, รับ, GND และ VCC
โอ 1 × สายอีเทอร์เน็ต (หลัก) - ความยาว: 400 มม (0.4 ม). สายเคเบิลจะต้องหุ้มฉนวนสายแพตช์ Cat5e/Cat6 พร้อมขั้วต่อ RJ45
โอ 2 × ชุดอะไหล่ - UART เพิ่มเติมสองเส้นและสายอีเธอร์เน็ตเพิ่มเติมสองเส้นที่จัดมาให้เป็นอะไหล่พร้อมกับชุดกราวด์
4. ไฟฟ้า/โปรโตคอล:
o การรวมกลุ่มต้องมีความโปร่งใสเกี่ยวกับเฟรมอีเธอร์เน็ตสำหรับวิดีโอ; ในกรณีที่จำเป็น หน่วยภาคพื้นดินอาจบรรจุกระแสข้อมูลใหม่ให้เป็นกระแสการขนส่งเดียว แต่ต้องรักษาข้อมูลเวลาและการระบุแหล่งที่มาต่อนก
โอ มัลติเพล็กซ์การวัดทางไกล: หน่วยกราวด์จะต้องส่งกระแสข้อมูลระยะไกลแบบมัลติเพล็กซ์หรือแบบแพ็กเก็ตลงในสตรีม UART เดียวพร้อมกรอบที่ชัดเจนและแท็กเสริมเพื่อแยกแยะข้อความตามรหัสนก. โปรโตคอลที่ใช้สำหรับมัลติเพล็กซ์จะต้องได้รับการจัดทำเป็นเอกสารและสนับสนุนโดยซอฟต์แวร์ GCS.
การเชื่อมต่อ & ข้อมูลจำเพาะของสายเคเบิล
ส่วนนี้แสดงรายการข้อมูลจำเพาะของสายเคเบิลและตัวเชื่อมต่อที่แนะนำ เพื่อให้มั่นใจถึงประสิทธิภาพที่เชื่อถือได้ในสภาพแวดล้อมทางอากาศและภาคพื้นดิน
1. สายอีเธอร์เน็ต (หน่วยอากาศ -> ชุดกล้องและกราวด์ -> กศน): สายแพทช์ Cat5e หรือ Cat6 ที่มีฉนวนหุ้มมาตรฐานพร้อมขั้วต่อ RJ45. ใช้ป้องกันอย่างเต็มที่ (สทป) สายเคเบิลหากการติดตั้งมี EMI สูง
2. ความยาวอีเธอร์เน็ต (หน่วยอากาศ): 1.0 เมตร ±5%
3. ความยาวอีเธอร์เน็ต (หน่วยภาคพื้นดิน): 400 มม. ± 5%
4. สายยูอาร์ที (หน่วยอากาศ -> การวัดและส่งข้อมูลทางไกลของ FCC): 4-สายเคเบิลตัวนำ (เท็กซัส, รับ, GND, ตัวเลือก RTS/CTS). ความยาว: 1.0 เมตร ±5%
5. สายยูอาร์ที (หน่วยภาคพื้นดิน -> GCS USB/UART): 400 มม. ± 5% (รวมอะแดปเตอร์ USB-UART หาก GCS กำหนด).
6. การป้องกันสายเคเบิลและการต่อสายดิน: จัดให้มีกราวด์ร่วมและให้แน่ใจว่ามีการสิ้นสุดการป้องกันที่ปลายด้านหนึ่งตามแนวทางปฏิบัติที่ดีที่สุด เพื่อหลีกเลี่ยงลูปกราวด์. ใช้การล็อค RJ45 หรือขั้วต่อแบบล็อคหากคาดว่าจะเกิดการสั่นสะเทือน
7. จัดเตรียมสายเคเบิลอะแดปเตอร์สำหรับเชื่อมต่อ Datalink UART กับตัวเชื่อมต่อการวัดและส่งข้อมูลทางไกล CUAV V5+ (หากหน่วยดาต้าลิงค์ไม่เปิดเผยตัวเชื่อมต่อที่เข้ากันได้โดยกำเนิด).
8. โดยที่กล้องรองรับ Power-over-Ethernet (โพอี) แต่ชุด Datalink Air ไม่ได้จ่าย PoE, จัดให้มีหัวฉีด PoE
เกี่ยวกับการทำงาน & ข้อกำหนดของโปรโตคอล
ข้อกำหนดและคำแนะนำด้านการทำงานที่สำคัญ:
1. บัตรประจำตัวต่อนก: แต่ละกระแสข้อมูล (วิดีโอหรือการวัดระยะไกล) ต้องติดแท็กด้วย Bird ID ที่ไม่ซ้ำกัน เพื่อให้ GCS สามารถแมปสตรีมไปยังยานพาหนะได้
2. โครงการมัลติเพล็กซ์: หน่วยภาคพื้นดินจะต้องใช้แผนมัลติเพล็กซ์แบบกำหนดสำหรับการวัดและส่งข้อมูลทางไกล (UART) อนุญาตให้ GCS แยกวิเคราะห์และกำหนดเส้นทางข้อความด้วย Bird ID 3. เวลาแฝงและปริมาณงาน: ระบบจะลดเวลาแฝงในการรวมเพิ่มเติมให้เหลือน้อยที่สุด 4. ความน่าเชื่อถือ: หน่วยภาคพื้นดินจะต้องจัดการกับการสูญเสียอากาศหนึ่งหน่วยขึ้นไปชั่วคราวอย่างสง่างาม และนำเสนอกระแสน้ำที่เหลืออยู่ให้กับ GCS ต่อไป
5. อินเทอร์เฟซการกำหนดค่า: ระบุวิธีการกำหนดค่า (เอกสารรายละเอียด) เพื่อตั้งค่ารหัสนก, อัตรารับส่งข้อมูล UART, และลำดับความสำคัญต่อสตรีม.
ถามคำถาม
ข้อความของคุณถูกส่งไปแล้ว