Համակարգը ներառում է տասնվեց օդային Datalink օդային միավորներ (մեկ թռչնի համար), a single Datalink Ground Unit, և վերգետնյա հսկողության կայան (GCS). The purpose is to specify interfaces, cable lengths, port counts, and acceptance tests so that units delivered by suppliers will interoperate with the existing FCC (flight control computer), տեսախցիկներ (seekers), and the GCS.
A complete solution is required for establishing a data link between a վերգետնյա կայան իսկ 4 UAV air units. The system should enable reliable communication, վերահսկողություն, and monitoring of all UAVs simultaneously. Detailed technical requirements are provided below.
Ընդհանուր ակնարկ:
∙ Կազմաձևում: 1 × Ground Control Unit (GCU) communicating with 4 × Air Units (AUs) ∙ Հաղորդակցության տեսակը: Point-to-Multipoint bidirectional link (Ethernet- ը + Uart) ∙ Լեռնաշղթա: ≥ 80 km line-of-sight (Է)
∙ Operating Band: 1.4ԳՀց(L-Band)
∙ Modulation Scheme: TDD-OFDM / QPSK / 16-ՔԱՄ
∙ Power Requirement: operating voltage (12Վ), Current threshold (≤ 2A) ∙ Temperature Range: -20°C to 75°C
Data Throughput and Bandwidth:
| Պարամետր | Պահանջ | Notes |
| Video Data Rate (per seeker) | 5 Մի քիչ 9 Մբիթ / վրկ | 1080p @ 30 fps H.264/265 compression |
| Հեռաչափություն + Հսկողություն (per FCC) | 200 Մի քիչ 300 կբիթ / վրկ | UART-based bidirectional control data |
| Aggregate Video Throughput (4 AUs) | 24 Մի քիչ 36 Մբիթ / վրկ | Համակցված տեսանյութի վերահղում |
| Ագրեգատային հեռաչափություն/վերահսկում | 1 Մբիթ / վրկ | Տեսանյութի համեմատ աննշան է |
| Ընդհանուր պահանջվող վերահղման թողունակություն | ≥ 36 Մբիթ / վրկ | Հետ 20% ՖԵԿ + վերադիր ≈ 42 Մբիթ / վրկ |
Հետաձգման և որակի պահանջներ:
| Պարամետր | Պահանջ | Notes |
| Bit Error Rate | < 8×10-8 | Առավելագույն միջակայքում |
| Տվյալների հետաձգում | < 1ms | Required for real-time seeker operation and data transmission |
| Փաթեթի կորուստ | < 1% | FEC-ի հետ + ARQ մեխանիզմներ |
| Սխալի ուղղում | ՖԵԿ + CRC + ARQ | Հեռաչափության հուսալիության համար պարտադիր է |
Կապել բյուջեն & ՌԴ պարամետրեր:
| Պարամետր | Target Value | Notes |
| Փոխանցել իշխանությունը (Օդային միավոր) | 4 – 5 Վ | – |
| Փոխանցել իշխանությունը (Վերգետնյա միավոր) | 4 – 5 Վ | – |
| Ալեհավաքի շահ (Օդային միավոր) | >3դԲ | Անթենային նախշ: Իզոտրոպիկ |
| Ալեհավաքի շահ (Վերգետնյա միավոր) | 12 Մի քիչ 18 դԲ | Ուղղորդող ալեհավաք |
| Ստացողի զգայունություն | –103dBm @ 10 MHz | 10⁻5 BER-ի համար |
| Հղման լուսանցք @ 80 կմ | > 10 դԲ | Ապահովում է կայուն տեսանյութ + տվյալների հղում |
Նշում:
⮚ For seamless integration between the CUAV V5+ flight controller and external peripherals, էական է, որ UART ջուլհակը պահպանի ա direct and uncomplicated wiring structure. Մասնավորապես, UART նավահանգստից ջուլհակը պետք է նախագծված լինի որպես ա single straight line connection without introducing any additional converters or intermediary boards. This minimizes potential points of failure, reduces latency, and ensures a lightweight and reliable wiring architecture.
⮚ Furthermore, the loom must operate at Transistor-Transistor Logic (TTL) voltage levels, as the V5+ flight controller communicates via TTL UART. Any deviation from TTL (such as RS-232 or RS-485 levels) would necessitate external level shifters or converters, which contradicts the requirement of a direct loom. By adhering to TTL standards, signal compatibility is maintained, ensuring:
o Direct communication between the V5+ and connected modules.
o Reduced hardware complexity by eliminating converters or translators. o Lower weight and improved reliability, as fewer components are involved in the signal path.
o Improved signal integrity, since additional conversion stages can introduce noise or timing mismatches.
In conclusion, the loom design should strictly provide a straight-through UART wiring harness operating at TTL voltages, aligning with the CUAV V5+ electrical specifications and guaranteeing optimal performance in airborne applications.
Համակարգի ակնարկ:
Բարձր մակարդակի համակարգի նկարագրություն:
1. Չորս անօդաչու թռչող սարք, յուրաքանչյուրը հագեցած է:
o 1 × Datalink օդային միավոր
o 1 × FCC (Թռիչքի կառավարման համակարգիչ, Է.Գ., FALSE V5+)
o 1 × Փնտրող / Տեսախցիկ
2. 1 × «Datalink» վերգետնյա միավորը միացված է վերգետնյա կառավարման կայանին (GCS).
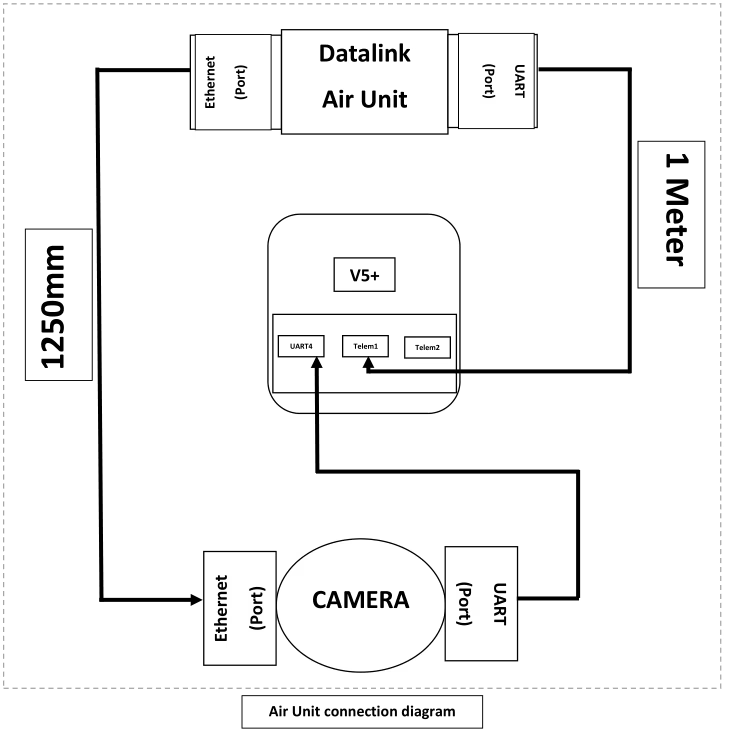
Տվյալների հոսք (ակնարկ): Video and sensor data from each camera is provided to its associated Datalink Air Unit via the camera’s Ethernet port. Telemetry and control data between the FCC and the Air Unit is carried over a UART link. The Datalink Air Unit transmits these streams over the data link to the Ground Unit; the Ground Unit demultiplexes the streams and presents them to the GCS as a single Ethernet stream (տեսախցիկի տեսանյութ և տվյալներ) և մեկ սերիալ (UART/USB) telemetry stream.
Օդային միավորի պահանջներ:
Յուրաքանչյուր Datalink օդային միավոր (մեկ անօդաչու թռչող սարքի համար) պետք է համապատասխանի հետևյալ պարտադիր պահանջներին:
1. Միջերես & Նավահանգիստներ (նվազագույնը):
o 1 × UART նավահանգիստ (նվազագույնը). This port shall be used for telemetry/control connectivity to the FCC (Հեռաչափական պորտեր Telem1 / Telem2-ը FCC-ում).
o 1 × Ethernet պորտ (նվազագույնը). This port shall be used to receive camera/seeker Ethernet data.
2. Մալուխային միացում (delivered with the Air Unit):
o 1 × UART մալուխ (առաջնային) - երկարությունը: 1.0 մ (± 5%). Մալուխը պետք է կրի TX, RX, GND and VCC. Cable must be terminated to match the Datalink UART connector on one end and the FCC telemetry connector on the other.
o 1 × Ethernet մալուխ (առաջնային) - երկարությունը: 1.0 մ (± 5%). Cable shall be standard shielded Cat5e or Cat6 patch cable with RJ45 connectors.
o 2 × պահեստային հավաքածուներ (մեկ օդային միավորի համար) — այսինքն., two additional UART cables and two additional Ethernet cables shall be supplied with each Air Unit (total supplied per unit = 3 UART cables, 3 Ethernet մալուխներ).
3. Մեխանիկական & Ֆիզիկական:
o Cables should be color-coded (խորհուրդ է տրվում) and have clear directionality markings if pinouts are not symmetric.
4. Electrical/Protocol:
o Uart: Աջակցեք ընդհանուր baud տոկոսադրույքներին մինչև առնվազն 921600 bps. Provide user configurable UART parameters.
o Ethernet- ը: Աջակցեք գոնե 100 Մբիթ/վրկ գործողություն (Նախընտրելի է Գիգաբիթ). Support common transport protocols (UDP, RTSP վիդեո և UDP հսկողության համար) — specific protocol selection shall be configurable.
Գրունտային միավորի պահանջներ:
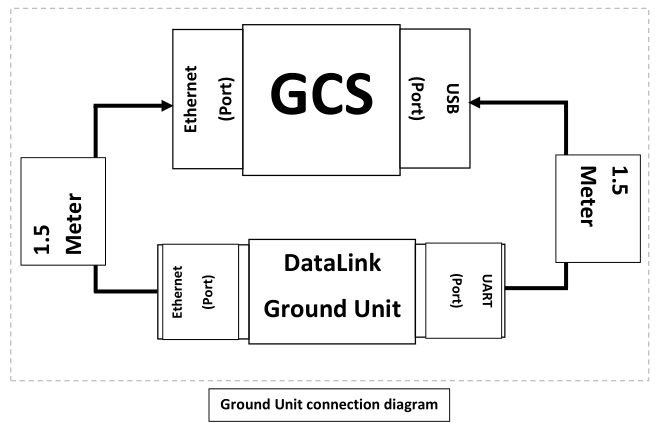
The Ground Unit performs demultiplexing of data from all four Air Units and presents a unified interface to the GCS. Պարտադիր պահանջներն են:
1. Միջերես & Նավահանգիստներ (նվազագույնը):
o 1 × UART նավահանգիստ (ներկայացվել է ԳԿՀ-ին). The Ground Unit shall aggregate telemetry streams from all four air units and present them to the GCS as a single UART/USB interface (Է.Գ., վերգետնյա միավոր UART-ը միացված է GCS-ի USB ինտերֆեյսին).
o 1 × Ethernet պորտ (ներկայացվել է ԳԿՀ-ին). The Ground Unit shall aggregate camera/video and data streams from the four air units and present them as a single Ethernet interface to the GCS.
2. Ագրեգացիոն վարքագիծ:
o The Ground Unit shall accept four independent incoming data streams (one from each Air Unit) and demultiplex them to a combined Ethernet stream and a combined serial stream. GCS-ից’ perspective there shall be only one Ethernet link and one UART link to configure and monitor.
o Aggregation must preserve source addressing, so the GCS can identify which stream is from which Bird. The Ground Unit shall not lose per-bird identification information.
3. Մալուխային միացում (առաքվել է վերգետնյա ստորաբաժանման հետ):
o 1 × UART մալուխ (առաջնային) - երկարությունը: 400 մմ (0.4 մ). Cable shall allow connection from the Ground Unit UART port to the GCS USB port (if the Ground Unit UART is a direct UART, ապահովել USB-UART ադապտեր մալուխ). The cable must carry TX, RX, GND and VCC.
o 1 × Ethernet մալուխ (առաջնային) - երկարությունը: 400 մմ (0.4 մ). Cable shall be shielded Cat5e/Cat6 patch cable with RJ45 connectors.
o 2 × spare sets — two additional UART and two additional Ethernet cables supplied as spares with the Ground Unit.
4. Electrical/Protocol:
o Aggregation shall be transparent with respect to Ethernet frames for video; where needed the Ground Unit may repackage streams into a single transport stream but must preserve timing information and per-bird source identification.
o Հեռուստաչափական մուլտիպլեքսավորում: The Ground Unit shall time-multiplex or packetize telemetry streams into a single UART stream with clear framing and optional tags to distinguish messages by bird ID. The protocol used for multiplexing must be documented and supported by the GCS software.
Միացում & Մալուխի բնութագրերը
This section lists the recommended cable and connector specifications to ensure reliable performance in the airborne and ground environments.
1. Ethernet մալուխներ (Air Unit -> Տեսախցիկ և վերգետնյա միավոր -> GCS): Standard shielded Cat5e or Cat6 patch cables with RJ45 terminations. Օգտագործեք ամբողջովին պաշտպանված (STP) cable if the installation has high EMI.
2. Ethernet length (Օդային միավոր): 1.0 m ±5%.
3. Ethernet length (Վերգետնյա միավոր): 400 mm ±5%.
4. UART մալուխներ (Air Unit -> FCC հեռաչափություն): 4-հաղորդիչ մալուխ (Տեխաս, RX, GND, կամընտիր RTS/CTS). Երկարությունը: 1.0 m ±5%.
5. UART cable (Ground Unit -> GCS USB/UART): 400 մմ ±5% (include USB-UART adapter if required by the GCS).
6. Մալուխի պաշտպանություն և հիմնավորում: Provide common ground and ensure shielding is terminated at one end per best-practice to avoid ground loops. Use locking RJ45 or latching connectors if vibration is expected.
7. Տրամադրեք ադապտերային մալուխներ Datalink UART-ին CUAV V5+ հեռաչափական միակցիչներին միացնելու համար (եթե Datalink միավորը բնօրինակ կերպով չի բացահայտում համատեղելի միակցիչը).
8. Որտեղ տեսախցիկը աջակցում է Power-over-Ethernet-ին (Պոունդ) but the Datalink Air Unit does not supply PoE, provide a PoE injector.
Ֆունկցիոնալ & Արձանագրության պահանջներ
Հիմնական ֆունկցիոնալ պահանջներ և առաջարկություններ:
1. Մեկ թռչունի նույնականացում: Յուրաքանչյուր տվյալների հոսք (Տեսանյութ կամ հեռաչափություն) MUST be tagged with a unique Bird ID so the GCS can map streams to vehicles.
2. Multiplexing Scheme: The Ground Unit shall implement a deterministic multiplexing scheme for telemetry (Uart) allowing GCS to parse and route messages by Bird ID. 3. Latency and Throughput: The system shall minimize additional aggregation latency. 4. Հուսալիություն: Ground Unit must handle temporary loss of one or more air units gracefully and continue to present remaining streams to the GCS.
5. Կազմաձևման ինտերֆեյս: Տրամադրեք կազմաձևման մեթոդ (մանրամասն փաստաթուղթ) to set Bird IDs, UART baud դրույքաչափերը, և յուրաքանչյուր հոսքի առաջնահերթությունները.
Հարց տվեք
Ձեր հաղորդագրությունն ուղարկվել է