Přehled systému UAV Datalink
The Systém UAV Datalink je navržen tak, aby umožňoval spolehlivou, komunikace v reálném čase, řízení, a monitorování pro více bezpilotních vzdušných prostředků (UAV). Systém se skládá ze čtyř UAV, každý vybaven a Vzduchová jednotka Datalink, A Počítač řízení letu (FCC, NAPŘ., FALSE V5+), a fotoaparát/hledač, stejně jako a Pozemní jednotka Datalink připojen k a Pozemní řídicí stanice (GCS).
Klíčové vlastnosti
- Konfigurace: 1 Pozemní jednotka komunikuje s 4 Vzdušné jednotky prostřednictvím obousměrného spojení point-to-multipoint (Ethernet + UART).
- Rozsah & Výkon: ≥ 80 km přímé viditelnosti s robustním video a telemetrickým spojením, podpora videa 1080p at 30 fps a telemetrická/řídicí data až do 921600 BPS.
- Rozhraní: Vzduchové jednotky poskytují 1 Port UART pro telemetrii FCC a 1 Ethernetový port pro data z kamery. Pozemní jednotka tyto toky agreguje a GCS představuje jediné rozhraní UART a Ethernet.
- Kabel & Elektroinstalace: Přímá připojení TTL UART minimalizují latenci a složitost. Ethernetové kabely podporují standardní připojení Cat5e/Cat6 se stíněním pro ochranu proti EMI.
- Spolehlivost & Latence: Bitová chybovost < 8×10⁻⁸, zpoždění dat < 1 slečna, Ztráta paketů < 1%, s FEC, CRC, a ARQ mechanismy pro zajištění nepřetržitého provozu.
- Flexibilita systému: Každý datový tok je označen jedinečným Bird ID, umožňuje GCS identifikovat a spravovat jednotlivá UAV. Systém pokračuje v provozu, i když jeden nebo více UAV dočasně ztratí spojení.
Tento Datalink System zajišťuje bezproblémovou integraci mezi UAV, Kamery, a pozemní ovládání, poskytující lehkost, vysoce výkonné řešení pro operace s více drony v reálném čase.
Dokumenty požadavků na datové spojení
Systém obsahuje šestnáct palubních jednotek Datalink Air Unit (jeden na ptáka), jedna pozemní jednotka Datalink, a pozemní řídící stanice (GCS). Účelem je specifikovat rozhraní, délky kabelů, počet portů, a akceptační testy, aby jednotky dodané dodavateli spolupracovaly se stávající FCC (počítač řízení letu), Kamery (hledači), a GCS.
Pro vytvoření datového spojení mezi a země stanice a 4 vzduch UAV jednotky. Systém by měl umožňovat spolehlivou komunikaci, řízení, a monitorování všech UAV současně. Podrobné technické požadavky jsou uvedeny níže.
Přehled:
- Konfigurace: 1 × Pozemní řídicí jednotka (GCU) komunikující s 4 × Vzdušné jednotky (Mimo)
- Typ komunikace: Obousměrné spojení Point-to-Multipoint (Ethernet + UART)
- Rozsah: ≥ 80 km přímé viditelnosti (THE)
- Provozní pásmo: 1.4GHz(L-pásmo)
- Modulační schéma: TDD-OFDM / QPSK / 16-QAM
- Požadavek na napájení: provozní napětí (12PROTI), Aktuální práh (≤2A)
- Teplotní rozsah: -20°C až 75 °C
Datová propustnost a šířka pásma:
| Parametr | Požadavek | Poznámky |
| Přenosová rychlost videa (na hledače) | 5 - 9 Mb / s | 1080p @ 30 fps komprese H.264/265 |
| Telemetrie + Řízení (podle FCC) | 200 - 300 kb / s | Obousměrná řídicí data založená na UART |
| Souhrnná propustnost videa (4 Mimo) | 24 - 36 Mb / s | Kombinovaný uplink videa |
| Agregátní telemetrie/řízení | 1 Mb / s | V porovnání s videem zanedbatelné |
| Celková požadovaná šířka pásma uplinku | ≥ 36 Mb / s | S 20% FEC + režie ≈ 42 Mb / s |
Latence a požadavky na kvalitu:
| Parametr | Požadavek | Poznámky |
| Bitová chybovost | < 8×10-8 | V maximálním dosahu |
| Zpoždění dat | < 1slečna | Vyžadováno pro práci vyhledávače v reálném čase a přenos dat |
| Ztráta paketů | < 1% | S FEC + ARQ mechanismy |
| Oprava chyb | FEC + CRC + ARQ | Povinné pro spolehlivost telemetrie |
Propojit rozpočet & RF parametry:
| Parametr | Cíl Hodnota | Poznámky |
| Přenášet výkon (Vzduchová jednotka) | 4 – 5 W | – |
| Přenášet výkon (Pozemní jednotka) | 4 – 5 W | – |
| Zisk antény (Vzduchová jednotka) | >3dB | Vzor antény: Izotropní |
| Zisk antény (Pozemní jednotka) | 12 - 18 dB | Směrová anténa |
| Citlivost přijímače | -103 dBm při 10 MHz | Za 10⁻⁵ BER |
| Okraj odkazu @ 80 km | > 10 dB | Zajišťuje robustní video + datový spoj |
POZNÁMKA:
- Pro bezproblémovou integraci mezi letovým ovladačem CUAV V5+ a externími periferiemi, je nezbytné, aby tkalcovský stav UART udržoval a přímá a nekomplikovaná struktura elektroinstalace. Konkrétně, tkalcovský stav z portu UART by měl být navržen jako a jednoduché přímé připojení bez zavádění jakýchkoli dalších převodníků nebo mezidesek. To minimalizuje potenciální body selhání, snižuje latenci, a zajišťuje lehkou a spolehlivou architekturu elektroinstalace.
- Dále, tkalcovský stav musí pracovat s logikou tranzistor-tranzistor (Ttl) úrovně napětí, protože letový ovladač V5+ komunikuje přes TTL UART. Jakákoli odchylka od TTL (jako jsou úrovně RS-232 nebo RS-485) by vyžadovalo externí řadiče nebo konvertory úrovně, což odporuje požadavku přímého tkalcovského stavu. Dodržováním standardů TTL, kompatibilita signálu je zachována, zajištění:
- Přímá komunikace mezi V5+ a připojenými moduly.
- Snížená hardwarová složitost odstraněním konvertorů nebo překladačů.
- Nižší hmotnost a vyšší spolehlivost, protože v cestě signálu je zapojeno méně komponent.
- Vylepšená integrita signálu, protože další konverzní stupně mohou způsobit šum nebo nesoulad v načasování.
- Dále, tkalcovský stav musí pracovat s logikou tranzistor-tranzistor (Ttl) úrovně napětí, protože letový ovladač V5+ komunikuje přes TTL UART. Jakákoli odchylka od TTL (jako jsou úrovně RS-232 nebo RS-485) by vyžadovalo externí řadiče nebo konvertory úrovně, což odporuje požadavku přímého tkalcovského stavu. Dodržováním standardů TTL, kompatibilita signálu je zachována, zajištění:
Na závěr,konstrukce tkalcovského stavu by měla striktně poskytovat přímý kabelový svazek UART pracující při napětí TTL,v souladu s elektrickými specifikacemi CUAV V5+ a zaručující optimální výkon ve vzdušných aplikacích.
Přehled systému:
Popis systému na vysoké úrovni:
- Čtyři UAV, každý vybaven:
- 1 × Datalink Air Unit
- 1 × FCC (Počítač řízení letu, NAPŘ., FALSE V5+)
- 1 × Hledač / Fotoaparát
- 1 × Pozemní jednotka Datalink propojená s pozemní řídicí stanicí (GCS).
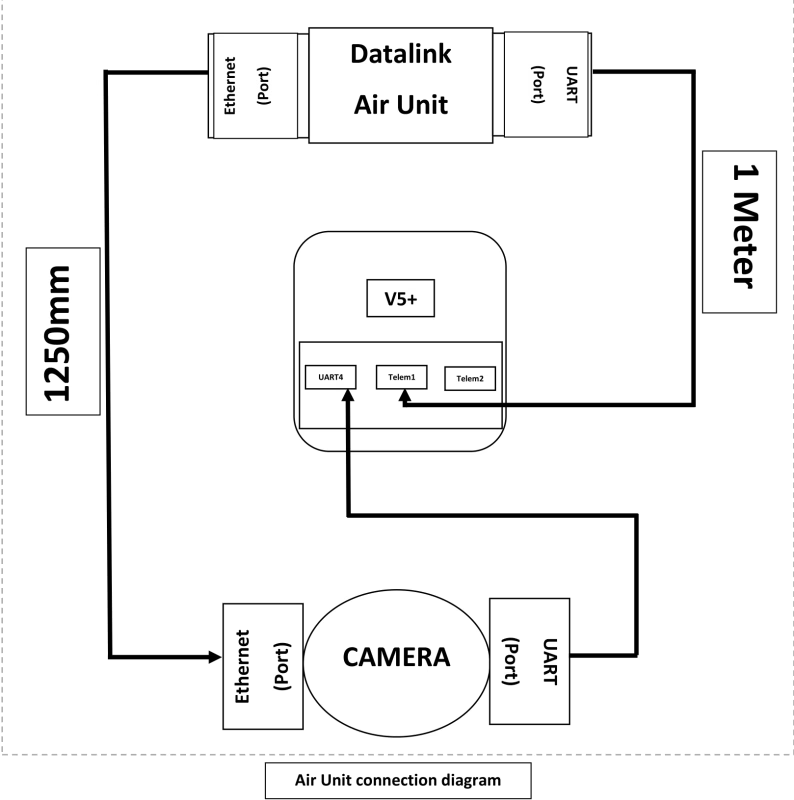
Datový tok (přehled): Video a data senzorů z každé kamery jsou poskytovány do příslušné jednotky Datalink Air Unit přes ethernetový port kamery. Telemetrická a řídicí data mezi FCC a vzduchovou jednotkou jsou přenášena přes UART linku. Jednotka Datalink Air Unit přenáší tyto toky přes datové spojení do pozemní jednotky; pozemní jednotka demultiplexuje toky a předkládá je GCS jako jeden ethernetový tok (video a data z kamery) a jeden seriál (UART/USB) telemetrický proud.
Požadavky na vzduchovou jednotku:
Každá jednotka Datalink Air Unit (jeden na UAV) musí splňovat následující povinné požadavky:
1. Rozhraní & Porty (minimální):
- 1 × port UART (minimální). Tento port se používá pro telemetrické/řídicí připojení k FCC (telemetrické porty Telem1 / Telem2 na FCC).
- 1 × Ethernet port (minimální). Tento port se používá pro příjem ethernetových dat kamery/vyhledávače.
2. Kabelová konektivita (dodávané s AirUnit):
- 1 × kabel UART (primární) — délka: 1.0 m (± 5%). Kabel musí přenášet TX, RX, GND a VCC. Kabel musí být zakončen tak, aby odpovídal konektoru Datalink UART na jednom konci a konektoru telemetrie FCC na druhém konci.
- 1 × Ethernetový kabel (primární) — délka: 1.0 m (± 5%). Kabel musí být standardní stíněný patch kabel Cat5e nebo Cat6 s konektory RJ45.
- 2 × náhradní sady (na vzduchovou jednotku) — tj., s každou vzduchovou jednotkou budou dodány dva další kabely UART a dva další kabely Ethernet (celkem dodáno na jednotku = 3 UART kabely, 3 Ethernetové kabely).
3. Mechanické & Fyzikální:
- Kabely by měly být barevně odlišeny (doporučeno) a mít jasné směrové značení, pokud vývody nejsou symetrické.
4. Elektrický / Protokol:
UART: Podporujte běžné přenosové rychlosti až do min 921600 BPS. Poskytnout uživatele- konfigurovatelné parametry UART.
Ethernet: Podporujte alespoň 100 Provoz Mbps (Gigabit preferován). Podpora běžných transportních protokolů (UDP, RTSP pro video a UDP pro ovládání) — výběr konkrétního protokolu musí být konfigurovatelný.
Požadavky na pozemní jednotky:
Pozemní jednotka provádí demultiplexování dat ze všech čtyř leteckých jednotek a představuje jednotné rozhraní pro GCS. Povinné požadavky jsou:
1. Rozhraní & Porty (minimální):
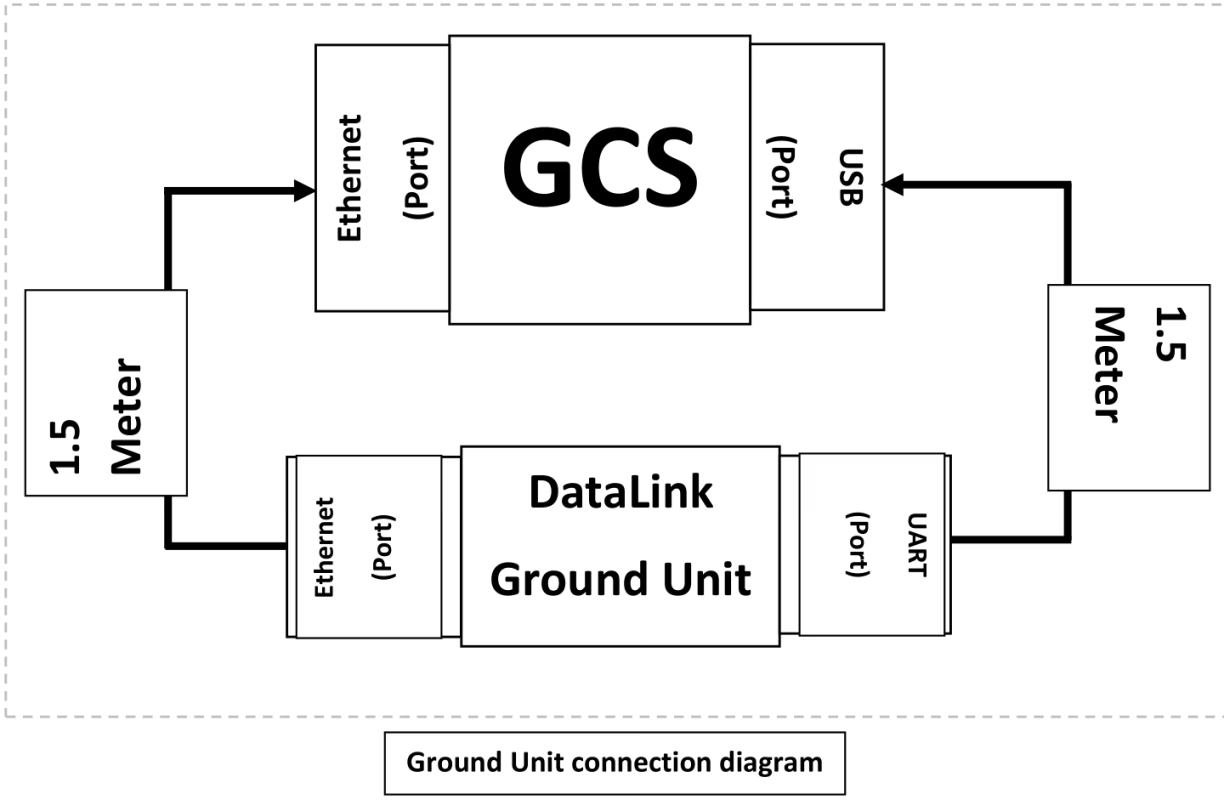
- 1 × port UART (předložena GCS). Pozemní jednotka agreguje toky telemetrie ze všech čtyř vzdušných jednotek a prezentuje je GCS jako jediné rozhraní UART/USB (NAPŘ., pozemní jednotka UART připojená k rozhraní USB na GCS).
- 1 × Ethernet port (předložena GCS). Pozemní jednotka bude agregovat kamerové/video a datové toky ze čtyř leteckých jednotek a prezentovat je jako jediné ethernetové rozhraní do GCS.
2. Agregační chování:
- Pozemní jednotka přijímá čtyři nezávislé příchozí datové toky (jeden z každé letecké jednotky) a demultiplexovat je do kombinovaného ethernetového toku a kombinovaného sériového toku. Z GCS’ Z hlediska konfigurace a monitorování bude existovat pouze jeden ethernetový spoj a jeden UART spoj.
- Agregace musí zachovat zdrojové adresování, takže GCS může identifikovat, který proud je z kterého ptáka. Pozemní jednotka neztratí identifikační údaje pro ptáka.
3. Kabelová konektivita (dodáváno s pozemní jednotkou):
- 1 × kabel UART (primární) — délka: 400 mm (0.4 m). Kabel musí umožňovat připojení z portu UART pozemní jednotky k portu USB GCS (pokud je UART pozemní jednotky přímý UART, poskytnout adaptérový kabel USB-UART). Kabel musí přenášet TX, RX, GND a VCC.
- 1 × Ethernetový kabel (primární) — délka: 400 mm (0.4 m). Kabel musí být stíněný patch kabel Cat5e/Cat6 s konektory RJ45.
- 2 × náhradní sady — dva další UART a dva další ethernetové kabely dodávané jako náhradní s pozemní jednotkou.
4. Elektrický / Protokol:
- Agregace musí být transparentní s ohledem na ethernetové rámce pro video; v případě potřeby může pozemní jednotka přebalit toky do jednoho transportního toku, ale musí zachovat informace o načasování a identifikaci zdroje pro každého ptáka.
Telemetrické multiplexování: Pozemní jednotka musí časově multiplexovat nebo paketovat toky telemetrie do jediného toku UART s jasným rámováním a volitelnými značkami pro rozlišení zpráv podle ID ptáka. Protokol použitý pro multiplexování musí být zdokumentován a podporován softwarem GCS.
Konektivita & Specifikace kabelu
Tato část uvádí doporučené specifikace kabelů a konektorů pro zajištění spolehlivého výkonu ve vzduchu i na zemi.
- Ethernetové kabely (Vzduchová jednotka -> Kamera a pozemní jednotka -> GCS): Standardní stíněné patch kabely Cat5e nebo Cat6 s koncovkami RJ45. Používejte plně stíněné (STP) kabel, pokud má instalace vysoké EMI.
- Ethernet délka (Vzduch Jednotka): 1.0 m ± 5 %.
- Ethernet délka (Země Jednotka): 400 mm ±5 %.
- UART kabely (Vzduchová jednotka -> FCC telemetrie): 4-vodičový kabel (TX, RX, GND, volitelná RTS/CTS). Délka: 1.0 m ± 5 %.
- UART kabel (Země Jednotka -> GCS USB/UART): 400 mm ±5 % (včetně adaptéru USB-UART, pokud to GCS vyžaduje).
- Stínění a uzemnění kabelů: Zajistěte společné uzemnění a zajistěte, aby bylo stínění ukončeno na jednom konci podle osvědčeného postupu, aby se zabránilo zemním smyčkám. Pokud očekáváte vibrace, použijte zajišťovací RJ45 nebo západkové konektory.
Poskytněte adaptérové kabely pro propojení Datalink UART s telemetrickými konektory CUAV V5+ (pokud jednotka Datalink nativně nevystavuje kompatibilní konektor).
- Kde kamera podporuje Power-over-Ethernet (Poe) ale jednotka Datalink Air neposkytuje PoE, poskytnout PoE injektor.
Funkční & Požadavky na protokol
Klíčové funkční požadavky a doporučení:
- Identifikace podle ptáka: Každý datový tok (video nebo telemetrie) MUSÍ být označen jedinečným Bird ID, aby GCS mohl mapovat proudy na vozidla.
- Multiplexování Systém: Pozemní jednotka musí implementovat deterministické multiplexní schéma pro telemetrii (UART) umožňuje GCS analyzovat a směrovat zprávy podle Bird ID.
- Latence a Propustnost: Systém musí minimalizovat další latenci agregace.
- Spolehlivost: Pozemní jednotka musí elegantně zvládnout dočasnou ztrátu jedné nebo více vzduchových jednotek a pokračovat v předávání zbývajících proudů GCS.
- Konfigurační rozhraní: Poskytněte metodu konfigurace (podrobný dokument) pro nastavení Bird ID, přenosové rychlosti UART, a priority jednotlivých proudů.
Položit otázku
Děkujeme za Vaši odpověď. ✨