Pangkalahatang-ideya ng UAV Datalink System
Ang UAV Datalink System ay dinisenyo upang paganahin ang mapagkakatiwalaan, real-time na komunikasyon, kontrolin, at pagsubaybay para sa maraming unmanned aerial vehicle (UAVS). Ang sistema ay binubuo ng apat na UAV, bawat isa ay nilagyan ng a Datalink Air Unit, a Flight Control Computer (FCC, Hal., Mali V5+), at isang camera/seeker, gayundin ang a Datalink Ground Unit konektado sa a Ground Control Station (GCS).
Mga pangunahing tampok
- Kumpigurasyon: 1 Ground Unit na nakikipag-ugnayan sa 4 Mga Air Unit sa pamamagitan ng isang point-to-multipoint na bidirectional na link (Ethernet + UART).
- Saklaw & Pagganap: ≥ 80 km line-of-sight na may matatag na mga link ng video at telemetry, sumusuporta sa 1080p na video sa 30 fps at telemetry/control data hanggang sa 921600 bps.
- Mga interface: Nagbibigay ang mga Air Unit 1 UART port para sa FCC telemetry at 1 Ethernet port para sa data ng camera. Pinagsasama-sama ng Ground Unit ang mga stream na ito at nagpapakita ng isang interface ng UART at Ethernet sa GCS.
- Cable & Mga kable: Pinaliit ng mga straight-through na TTL UART na koneksyon ang latency at pagiging kumplikado. Sinusuportahan ng mga Ethernet cable ang mga karaniwang koneksyon ng Cat5e/Cat6 na may shielding para sa proteksyon ng EMI.
- Pagiging maaasahan & Latency: Bit rate ng error < 8×10⁻⁸, pagkaantala ng data < 1 ms, pagkawala ng packet < 1%, kasama ang FEC, CRC, at mga mekanismo ng ARQ upang matiyak ang tuluy-tuloy na operasyon.
- Flexibility ng System: Ang bawat stream ng data ay na-tag ng isang natatanging Bird ID, na nagpapahintulot sa GCS na tukuyin at pamahalaan ang mga indibidwal na UAV. Patuloy na gumagana ang system kahit na pansamantalang mawalan ng koneksyon ang isa o higit pang UAV.
Tinitiyak ng Datalink System na ito ang tuluy-tuloy na pagsasama sa pagitan ng mga UAV, camera, at kontrol sa lupa, pagbibigay ng magaan, high-performance solution para sa real-time na multi-drone operations.
Mga dokumento ng kinakailangan sa pag-link ng data
Ang system ay binubuo ng labing -anim na airborne datalink air unit (isa bawat ibon), iisang Datalink Ground Unit, at isang ground control station (GCS). Ang layunin ay upang tukuyin ang mga interface, haba ng cable, mga bilang ng port, at mga pagsubok sa pagtanggap upang ang mga yunit na inihatid ng mga supplier ay makikipag-ugnay sa kasalukuyang FCC (Flight Control Computer), camera (naghahanap), at ang GCS.
Ang isang kumpletong solusyon ay kinakailangan para sa pagtatatag ng isang link ng data sa pagitan ng a lupa istasyon at 4 UAV hangin mga yunit. Ang system ay dapat paganahin ang maaasahang komunikasyon, kontrolin, at pagsubaybay sa lahat ng UAV nang sabay-sabay. Ang mga detalyadong teknikal na kinakailangan ay ibinigay sa ibaba.
Pangkalahatang -ideya:
- Kumpigurasyon: 1 × yunit ng control ground (GCU) nakikipag -usap sa 4 × mga yunit ng hangin (Sa labas ng)
- Uri ng Komunikasyon: Point-to-Multipoint Bidirectional Link (Ethernet + UART)
- Saklaw: ≥ 80 KM line-of-sight (Los)
- Operating band: 1.4GHz(L-band)
- Scheme ng modulation: TDD-OFDM / QPSK / 16-QAM
- Kinakailangan ng Power: operating boltahe (12V), Kasalukuyang threshold (≤2a)
- Saklaw ng temperatura: -20° C hanggang 75 ° C.
Data throughput at bandwidth:
| Parameter | Kinakailangan | Mga Tala |
| Rate ng data ng video (bawat naghahanap) | 5 - 9 Mga Mbps | 1080p @ 30 fps H.264/265 compression |
| Telemetry + Kontrolin (bawat fcc) | 200 - 300 kbps | Ang data ng control ng bidirectional na batay sa UART |
| Pinagsama -samang video throughput (4 Sa labas ng) | 24 - 36 Mga Mbps | Pinagsamang video uplink |
| Pinagsama -samang telemetry/control | 1 Mga Mbps | Bale -wala kumpara sa video |
| Kabuuang kinakailangang uplink bandwidth | ≥ 36 Mga Mbps | Kasama 20% FEC + overhead ≈ 42 Mga Mbps |
Mga kinakailangan sa latency at kalidad:
| Parameter | Kinakailangan | Mga Tala |
| Bit error rate | < 8×10-8 | Sa Max Range |
| Pagkaantala ng data | < 1ms | Kinakailangan para sa real-time na paghahanap at paghahatid ng data |
| Pagkawala ng packet | < 1% | Sa FEC + Mga mekanismo ng ARQ |
| Pagwawasto ng error | FEC + CRC + ARQ | Mandatory para sa pagiging maaasahan ng telemetry |
Mag -link ng badyet & RF Mga Parameter:
| Parameter | Target Halaga | Mga Tala |
| Magpadala ng kapangyarihan (Air unit) | 4 – 5 W | – |
| Magpadala ng kapangyarihan (Yunit ng lupa) | 4 – 5 W | – |
| Antenna Gain (Air unit) | >3dB | Pattern ng antena: Isotropic |
| Antenna Gain (Yunit ng lupa) | 12 - 18 dB | Direksyon ng antena |
| Sensitivity ng tatanggap | –103dBm @10 MHz | Para sa 10⁻⁵ ber |
| Link margin @ 80 km | > 10 dB | Tinitiyak ang matatag na video + Data Link |
Tandaan:
- Para sa tuluy-tuloy na pagsasama sa pagitan ng CUAV V5+ flight controller at mga panlabas na peripheral, Mahalaga na ang uart loom ay nagpapanatili ng a direkta at hindi kumplikadong istraktura ng mga kable. Partikular, Ang loom mula sa port ng UART ay dapat na idinisenyo bilang a solong tuwid na linya na koneksyon nang hindi nagpapakilala ng anumang karagdagang mga converter o intermediary board. Pinapaliit nito ang mga potensyal na puntos ng pagkabigo, binabawasan ang latency, at tinitiyak ang magaan at maaasahang arkitektura ng mga kable.
- Higit pa rito, Ang loom ay dapat gumana sa Transistor-Transistor Logic (Ttl) mga antas ng boltahe, Tulad ng pakikipag -usap ng V5+ Flight Controller sa pamamagitan ng TTL UART. Anumang paglihis mula sa TTL (tulad ng mga antas ng RS-232 o RS-485) mangangailangan ng mga external na level shifter o converter, na sumasalungat sa kahilingan ng isang direktang pag -loom. Sa pamamagitan ng pagsunod sa mga pamantayan ng TTL, Ang pagiging tugma ng signal ay pinananatili, tinitiyak:
- Direktang komunikasyon sa pagitan ng V5+ at konektadong mga module.
- Binawasan ang pagiging kumplikado ng hardware sa pamamagitan ng pag-aalis ng mga converter o tagasalin.
- Mas mababang timbang at pinahusay na pagiging maaasahan, dahil mas kaunting mga bahagi ang kasangkot sa landas ng signal.
- Pinahusay na integridad ng signal, dahil ang mga karagdagang yugto ng conversion ay maaaring magpakilala ng ingay o timing mismatches.
- Higit pa rito, Ang loom ay dapat gumana sa Transistor-Transistor Logic (Ttl) mga antas ng boltahe, Tulad ng pakikipag -usap ng V5+ Flight Controller sa pamamagitan ng TTL UART. Anumang paglihis mula sa TTL (tulad ng mga antas ng RS-232 o RS-485) mangangailangan ng mga external na level shifter o converter, na sumasalungat sa kahilingan ng isang direktang pag -loom. Sa pamamagitan ng pagsunod sa mga pamantayan ng TTL, Ang pagiging tugma ng signal ay pinananatili, tinitiyak:
Sa konklusyon,ang disenyo ng loom ay dapat na mahigpit na nagbibigay ng isang straight-through na UART wiring harness na tumatakbo sa mga boltahe ng TTL,umaayon sa mga detalye ng CUAV V5+electrical at ginagarantiyahan ang pinakamainam na pagganap sa mga airborne application.
Pangkalahatang -ideya ng system:
Paglalarawan ng High-level System:
- Apat na UAV, bawat gamit:
- 1 × Datalink Air Unit
- 1 × fcc (Flight Control Computer, Hal., Mali V5+)
- 1 × Seeker / Camera
- 1 × Datalink ground unit na konektado sa ground control station (GCS).
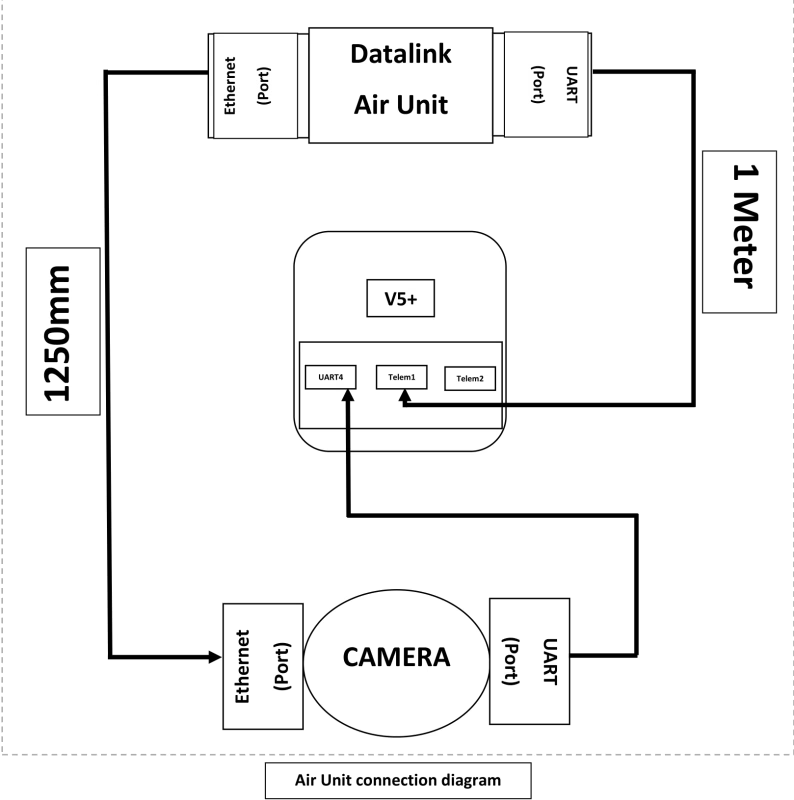
Daloy ng data (Pangkalahatang -ideya): Ang data ng video at sensor mula sa bawat camera ay ibinibigay sa nauugnay nitong Datalink Air Unit sa pamamagitan ng Ethernet port ng camera. Ang data ng telemetry at kontrol sa pagitan ng FCC at Air Unit ay dinadala sa isang UART link. Ang Datalink Air Unit ay nagpapadala ng mga stream na ito sa pamamagitan ng data link sa Ground Unit; idini-demultiplex ng Ground Unit ang mga stream at ipapakita ang mga ito sa GCS bilang isang Ethernet stream (video at data ng camera) at isang solong serial (Uart/usb) stream ng telemetry.
Mga Kinakailangan sa Air Unit:
Bawat yunit ng air datalink (isa bawat uav) dapat matugunan ang mga sumusunod na kinakailangan sa ipinag -uutos:
1. Mga interface & Mga port (minimum):
- 1 × port ng uart (minimum). Ang port na ito ay dapat gamitin para sa telemetry/control connectivity sa FCC (Telemetry Ports Telem1 / Telem2 sa FCC).
- 1 × Ethernet port (minimum). Ang port na ito ay dapat gamitin upang makatanggap ng data ng Ethernet ng camera/seeker.
2. Koneksyon ng cable (naihatid kasama ang AirUnit):
- 1 × uart cable (Pangunahing) - Haba: 1.0 m (± 5%). Ang cable ay dapat magdala ng tx, RX, GND at VCC. Dapat na wakasan ang cable upang tumugma sa Datalink UART connector sa isang dulo at ang FCC telemetry connector sa kabilang dulo.
- 1 × Ethernet cable (Pangunahing) - Haba: 1.0 m (± 5%). Ang cable ay dapat na standard shielded Cat5e o Cat6 patch cable na may RJ45 connectors.
- 2 × ekstrang set (bawat yunit ng hangin) - i.e., dalawang karagdagang UART cable at dalawang karagdagang Ethernet cable ang dapat ibigay sa bawat Air Unit (kabuuang naibigay sa bawat yunit = 3 Uart cable, 3 Ethernet cable).
3. Mekanikal & Pisikal:
- Ang mga cable ay dapat na color-coded (inirerekumenda) at magkaroon ng malinaw na mga marka ng direksyon kung ang mga pinout ay hindi simetriko.
4. Electrical / Protocol:
UART: Suportahan ang mga karaniwang rate ng baud hanggang sa hindi bababa sa 921600 bps. Magbigay ng user- na-configure na mga parameter ng UART.
Ethernet: Suportahan kahit papaano 100 Operasyon ng MBPS (Mas gusto ni Gigabit). Suportahan ang mga karaniwang protocol ng transportasyon (UDP, RTSP para sa video at UDP para sa kontrol) — ang partikular na pagpili ng protocol ay dapat i-configure.
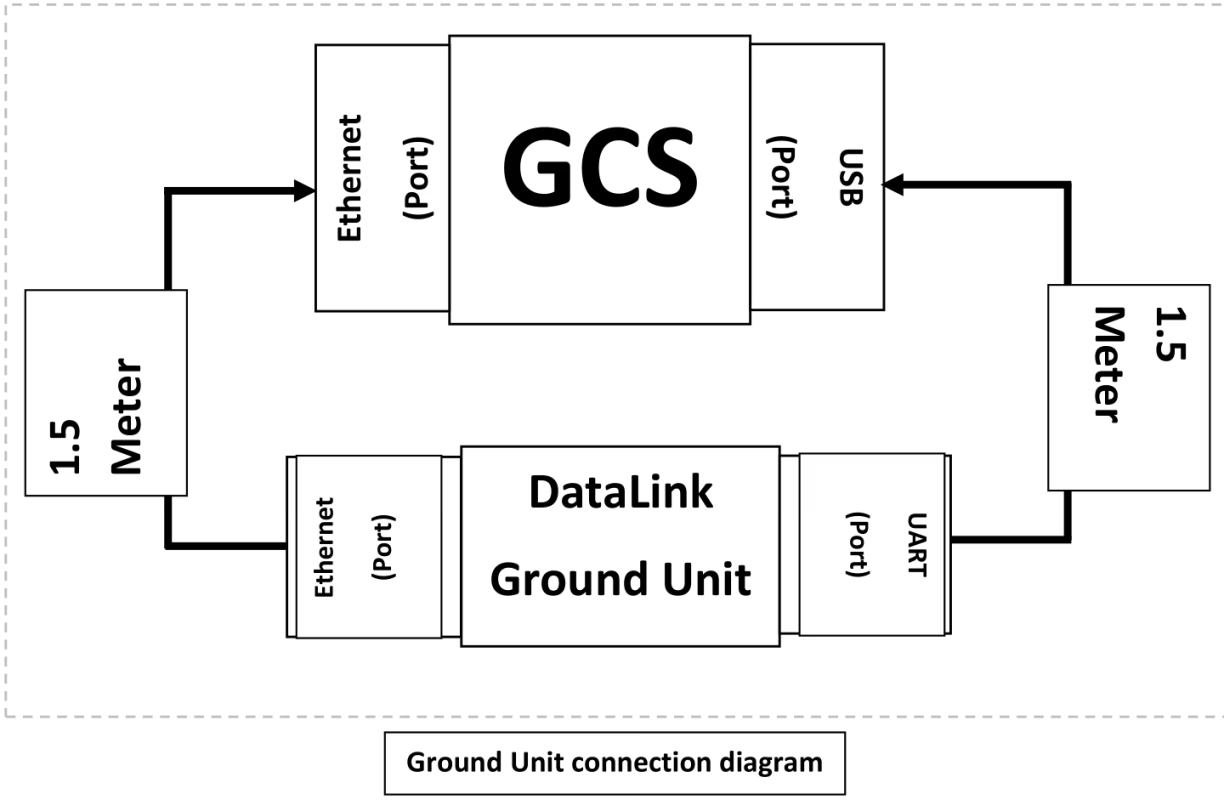
Mga kinakailangan sa yunit ng lupa:
Ang Ground Unit ay nagsasagawa ng demultiplexing ng data mula sa lahat ng apat na Air Units at nagpapakita ng pinag-isang interface sa GCS. Ang mga kinakailangan sa ipinag -uutos ay:
1. Mga interface & Mga port (minimum):
- 1 × port ng uart (Iniharap sa GCS). Dapat pagsama-samahin ng Ground Unit ang mga stream ng telemetry mula sa lahat ng apat na air unit at ipapakita ang mga ito sa GCS bilang isang interface ng UART/USB (Hal., Ang ground unit uart na konektado sa isang USB interface sa GCS).
- 1 × Ethernet port (Iniharap sa GCS). Dapat pagsama-samahin ng Ground Unit ang mga stream ng camera/video at data mula sa apat na air unit at ipapakita ang mga ito bilang isang Ethernet interface sa GCS.
2. Pag -uugali ng pagsasama:
- Ang Ground Unit ay tatanggap ng apat na independiyenteng papasok na data stream (isa mula sa bawat Air Unit) at demultiplex ang mga ito sa isang pinagsamang stream ng Ethernet at isang pinagsamang serial stream. Mula sa GCS’ perspective na magkakaroon lamang ng isang Ethernet link at isang UART link upang i-configure at subaybayan.
- Dapat mapanatili ng pagsasama-sama ang address ng pinagmulan, para matukoy ng GCS kung aling stream ang pinanggalingan ng Bird. Ang Ground Unit ay hindi mawawalan ng impormasyon sa pagkakakilanlan ng bawat ibon.
3. Koneksyon ng cable (naihatid sa yunit ng lupa):
- 1 × uart cable (Pangunahing) - Haba: 400 mm (0.4 m). Dapat payagan ng cable ang koneksyon mula sa Ground Unit UART port papunta sa GCS USB port (kung ang Ground Unit UART ay direktang UART, Magbigay ng isang USB-Uart adapter cable). Ang cable ay dapat magdala ng TX, RX, GND at VCC.
- 1 × Ethernet cable (Pangunahing) - Haba: 400 mm (0.4 m). Ang cable ay dapat may shielded Cat5e/Cat6 patch cable na may RJ45 connectors.
- 2 × ekstrang set — dalawang karagdagang UART at dalawang karagdagang Ethernet cable na ibinibigay bilang mga spare sa Ground Unit.
4. Electrical / Protocol:
- Ang pagsasama-sama ay dapat maging transparent kaugnay ng mga Ethernet frame para sa video; kung saan kinakailangan ang Ground Unit ay maaaring mag-repackage ng mga stream sa iisang transport stream ngunit dapat panatilihin ang impormasyon ng timing at bawat-bird source identification.
Telemetry Multiplexing: Ang Ground Unit ay dapat mag-time-multiplex o mag-packet ng mga telemetry stream sa isang stream ng UART na may malinaw na framing at mga opsyonal na tag upang makilala ang mga mensahe sa pamamagitan ng bird ID. Ang protocol na ginagamit para sa multiplexing ay dapat na dokumentado at sinusuportahan ng software ng GCS.
Pagkakakonekta & Mga pagtutukoy ng cable
Inililista ng seksyong ito ang inirerekomendang mga detalye ng cable at connector upang matiyak ang maaasahang pagganap sa mga kapaligirang nasa hangin at lupa.
- Ethernet cable (Air Unit -> Camera at ground unit -> GCS): Mga karaniwang shielded na Cat5e o Cat6 na patch cable na may RJ45 terminations. Gumamit ng ganap na kalasag (STP) cable kung ang pag-install ay may mataas na EMI.
- Ethernet haba (Hangin Yunit): 1.0 m ±5%.
- Ethernet haba (Lupa Yunit): 400 mm ± 5%.
- Uart cable (Air Unit -> FCC Telemetry): 4-conductor cable (TX, RX, GND, Opsyonal na RTS/CTS). Haba: 1.0 m ±5%.
- UART cable (Lupa Yunit -> GCS USB/UART): 400 mm ± 5% (isama ang USB-UART adapter kung kinakailangan ng GCS).
- Ang kalasag ng cable at saligan: Magbigay ng common ground at tiyaking wawakasan ang shielding sa isang dulo sa bawat pinakamahusay na kasanayan upang maiwasan ang mga ground loop. Gumamit ng locking RJ45 o latching connectors kung inaasahan ang vibration.
Magbigay ng mga cable ng adapter para sa interface ng DataLink UART sa CUAV V5+ Telemetry Connectors (Kung ang yunit ng datalink ay hindi katutubong naglalantad ng isang katugmang konektor).
- Kung saan sinusuportahan ng camera ang power-over-ethernet (Poe) ngunit ang Datalink Air Unit ay hindi nagbibigay ng PoE, magbigay ng PoE injector.
Functional & Mga Kinakailangan sa Protocol
Pangunahing mga kinakailangan sa pag -andar at rekomendasyon:
- Pagkilala sa Per-Bird: Bawat stream ng data (video o telemetry) DAPAT ma-tag gamit ang isang natatanging Bird ID upang maimapa ng GCS ang mga stream sa mga sasakyan.
- Multiplexing Scheme: Ang Ground Unit ay magpapatupad ng isang deterministikong multiplexing scheme para sa telemetry (UART) nagbibigay-daan sa GCS na i-parse at iruta ang mga mensahe sa pamamagitan ng Bird ID.
- Latency at Throughput: Dapat bawasan ng system ang karagdagang latency ng pagsasama-sama.
- Pagiging maaasahan: Dapat pangasiwaan ng Ground Unit ang pansamantalang pagkawala ng isa o higit pang mga air unit nang maganda at patuloy na ipakita ang mga natitirang stream sa GCS.
- Interface ng pagsasaayos: Magbigay ng isang paraan ng pagsasaayos (isang detalyadong dokumento) para magtakda ng mga Bird ID, Mga rate ng Uart Baud, at mga priyoridad sa per-stream.
Magtanong
Ipinadala ang iyong mensahe