UAV Datalink համակարգի ակնարկ
Այն UAV Datalink System նախագծված է հուսալի դարձնելու համար, իրական ժամանակի հաղորդակցություն, վերահսկողություն, և մի քանի անօդաչու թռչող սարքերի մոնիտորինգ (Աշտարակ). Համակարգը բաղկացած է չորս անօդաչու թռչող սարքերից, յուրաքանչյուրը հագեցած ա Datalink օդային միավոր, էունք Թռիչքի կառավարման համակարգիչ (FCC, Է.Գ., FALSE V5+), և տեսախցիկ/որոնող, ինչպես նաև ա Datalink ստորերկրյա միավոր կապված ա Վերգետնյա կառավարման կայան (GCS).
Հիմնական հատկանիշները
- Կազմաձևում: 1 Գրունտային ստորաբաժանման հետ հաղորդակցվող 4 Օդային միավորներ՝ կետից բազմակետ երկկողմանի կապի միջոցով (Ethernet- ը + Uart).
- Լեռնաշղթա & Կատարում: ≥ 80 կմ տեսողության գիծ՝ ամուր տեսա և հեռաչափական կապերով, աջակցում է 1080p վիդեո 30 fps և հեռաչափության/կառավարման տվյալներ մինչև 921600 bps.
- Միջերես: Օդային ստորաբաժանումները տրամադրում են 1 UART նավահանգիստ FCC հեռաչափության համար և 1 Ethernet պորտ տեսախցիկի տվյալների համար. Գրունտային միավորը միավորում է այս հոսքերը և ներկայացնում է մեկ UART և Ethernet ինտերֆեյս GCS-ին.
- Մալուխ & Հաղորդալարեր: Ուղղակի TTL UART միացումները նվազագույնի են հասցնում հետաձգումը և բարդությունը. Ethernet մալուխները աջակցում են ստանդարտ Cat5e/Cat6 միացումներին՝ պաշտպանելով EMI պաշտպանությունը.
- Հուսալիություն & Լատենտություն: Բիթային սխալի մակարդակը < 8×10⁸8, տվյալների ուշացում < 1 ms, փաթեթի կորուստ < 1%, FEC-ի հետ, CRC, և ARQ մեխանիզմները՝ շարունակական շահագործումն ապահովելու համար.
- Համակարգի ճկունություն: Տվյալների յուրաքանչյուր հոսք հատկորոշված է եզակի Bird ID-ով, թույլ տալով GCS-ին բացահայտել և կառավարել առանձին անօդաչու թռչող սարքեր. Համակարգը շարունակում է գործել, նույնիսկ եթե մեկ կամ մի քանի անօդաչու թռչող սարքեր ժամանակավորապես կորցնեն կապը.
Այս Datalink համակարգը ապահովում է անթերի ինտեգրում UAV-ների միջև, տեսախցիկներ, և վերգետնյա հսկողություն, ապահովելով թեթևություն, բարձր կատարողական լուծում իրական ժամանակում բազմատար անօդաչու սարքերի համար.
Տվյալների կապի պահանջի փաստաթղթեր
Համակարգը ներառում է տասնվեց օդային Datalink օդային միավորներ (մեկ թռչնի համար), մեկ Datalink Ground Unit, և վերգետնյա հսկողության կայան (GCS). The purpose is to specify interfaces, cable lengths, port counts, and acceptance tests so that units delivered by suppliers will interoperate with the existing FCC (flight control computer), տեսախցիկներ (seekers), and the GCS.
A complete solution is required for establishing a data link between a ground station իսկ 4 UAV air միավորներ. The system should enable reliable communication, վերահսկողություն, and monitoring of all UAVs simultaneously. Detailed technical requirements are provided below.
Ընդհանուր ակնարկ:
- Կազմաձևում: 1 × Ground Control Unit (GCU) communicating with 4 × Air Units (AUs)
- Հաղորդակցության տեսակը: Point-to-Multipoint bidirectional link (Ethernet- ը + Uart)
- Լեռնաշղթա: ≥ 80 km line-of-sight (Է)
- Operating Band: 1.4ԳՀց(L-Band)
- Modulation Scheme: TDD-OFDM / QPSK / 16-ՔԱՄ
- Power Requirement: operating voltage (12Վ), Current threshold (≤ 2A)
- Temperature Range: -20°C to 75°C
Data Throughput and Bandwidth:
| Պարամետր | Պահանջ | Notes |
| Video Data Rate (per seeker) | 5 Մի քիչ 9 Մբիթ / վրկ | 1080p @ 30 fps H.264/265 compression |
| Հեռաչափություն + Հսկողություն (per FCC) | 200 Մի քիչ 300 կբիթ / վրկ | UART-based bidirectional control data |
| Aggregate Video Throughput (4 AUs) | 24 Մի քիչ 36 Մբիթ / վրկ | Համակցված տեսանյութի վերահղում |
| Ագրեգատային հեռաչափություն/վերահսկում | 1 Մբիթ / վրկ | Տեսանյութի համեմատ աննշան է |
| Ընդհանուր պահանջվող վերահղման թողունակություն | ≥ 36 Մբիթ / վրկ | Հետ 20% ՖԵԿ + վերադիր ≈ 42 Մբիթ / վրկ |
Հետաձգման և որակի պահանջներ:
| Պարամետր | Պահանջ | Notes |
| Bit Error Rate | < 8×10-8 | Առավելագույն միջակայքում |
| Տվյալների հետաձգում | < 1ms | Պահանջվում է իրական ժամանակի որոնման և տվյալների փոխանցման համար |
| Փաթեթի կորուստ | < 1% | FEC-ի հետ + ARQ մեխանիզմներ |
| Սխալի ուղղում | ՖԵԿ + CRC + ARQ | Հեռաչափության հուսալիության համար պարտադիր է |
Կապել բյուջեն & ՌԴ պարամետրեր:
| Պարամետր | Թիրախ Արժեք | Notes |
| Փոխանցել իշխանությունը (Օդային միավոր) | 4 – 5 Վ | – |
| Փոխանցել իշխանությունը (Վերգետնյա միավոր) | 4 – 5 Վ | – |
| Ալեհավաքի շահ (Օդային միավոր) | >3դԲ | Անթենային նախշ: Իզոտրոպիկ |
| Ալեհավաքի շահ (Վերգետնյա միավոր) | 12 Մի քիչ 18 դԲ | Ուղղորդող ալեհավաք |
| Ստացողի զգայունություն | –103dBm @10 MHz | 10⁻5 BER-ի համար |
| Հղման լուսանցք @ 80 կմ | > 10 դԲ | Ապահովում է կայուն տեսանյութ + տվյալների հղում |
Նշում:
- CUAV V5+ թռիչքի կարգավորիչի և արտաքին ծայրամասային սարքերի միջև անխափան ինտեգրման համար, էական է, որ UART ջուլհակը պահպանի ա ուղղակի և ոչ բարդ լարերի կառուցվածքը. Մասնավորապես, UART նավահանգստից ջուլհակը պետք է նախագծված լինի որպես ա մեկ ուղիղ գծի միացում՝ առանց լրացուցիչ փոխարկիչների կամ միջնորդ տախտակների ներմուծման. This minimizes potential points of failure, reduces latency, and ensures a lightweight and reliable wiring architecture.
- Բացի այդ, the loom must operate at Transistor-Transistor Logic (TTL) voltage levels, as the V5+ flight controller communicates via TTL UART. Any deviation from TTL (such as RS-232 or RS-485 levels) would necessitate external level shifters or converters, which contradicts the requirement of a direct loom. By adhering to TTL standards, signal compatibility is maintained, ensuring:
- Direct communication between the V5+ and connected modules.
- Reduced hardware complexity by eliminating converters or translators.
- Lower weight and improved reliability, as fewer components are involved in the signal path.
- Improved signal integrity, since additional conversion stages can introduce noise or timing mismatches.
- Բացի այդ, the loom must operate at Transistor-Transistor Logic (TTL) voltage levels, as the V5+ flight controller communicates via TTL UART. Any deviation from TTL (such as RS-232 or RS-485 levels) would necessitate external level shifters or converters, which contradicts the requirement of a direct loom. By adhering to TTL standards, signal compatibility is maintained, ensuring:
In conclusion,ջուլհակի դիզայնը պետք է խստորեն ապահովի ուղիղ գծով UART լարերի ամրացում, որն աշխատում է TTL լարման վրա,համապատասխանեցում CUAV V5+ էլեկտրական տեխնիկական բնութագրերին և երաշխավորում օպտիմալ կատարում օդային կիրառություններում.
Համակարգի ակնարկ:
Բարձր մակարդակի համակարգի նկարագրություն:
- Չորս անօդաչու թռչող սարք, յուրաքանչյուրը հագեցած է:
- 1 × Datalink օդային միավոր
- 1 × FCC (Թռիչքի կառավարման համակարգիչ, Է.Գ., FALSE V5+)
- 1 × Փնտրող / Տեսախցիկ
- 1 × «Datalink» վերգետնյա միավորը միացված է վերգետնյա կառավարման կայանին (GCS).
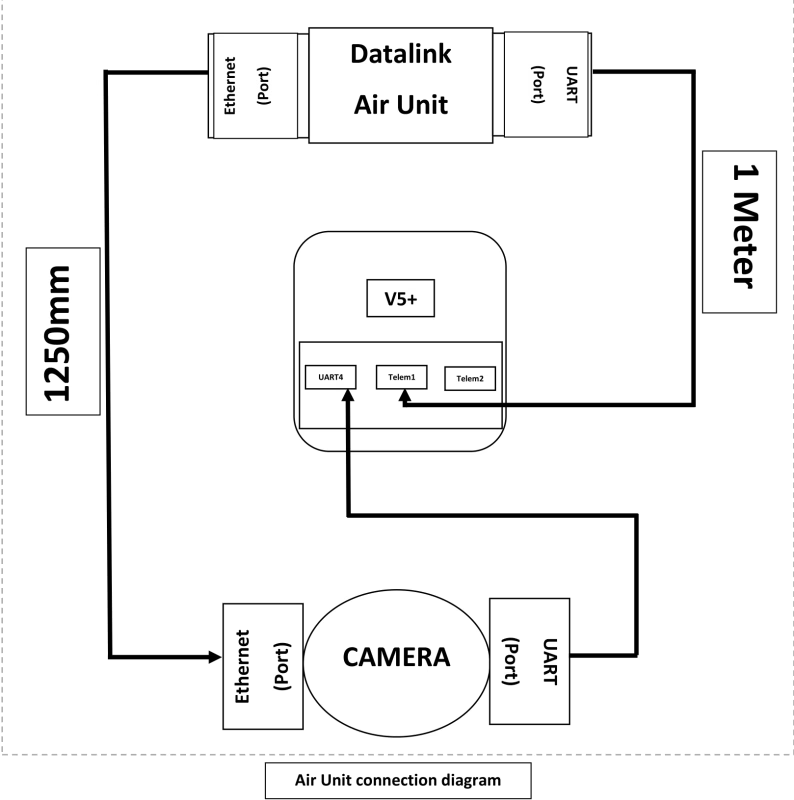
Տվյալների հոսք (ակնարկ): Յուրաքանչյուր տեսախցիկի տեսանյութը և սենսորային տվյալները տրամադրվում են դրա հետ կապված Datalink օդային միավորին տեսախցիկի Ethernet պորտի միջոցով. FCC-ի և օդային ստորաբաժանման միջև հեռաչափության և հսկողության տվյալները փոխանցվում են UART կապով. Datalink օդային միավորը փոխանցում է այս հոսքերը տվյալների հղման միջոցով դեպի վերգետնյա միավոր; Գրունտային միավորը ապամուլտիպլեքսացնում է հոսքերը և ներկայացնում դրանք GCS որպես մեկ Ethernet հոսք (տեսախցիկի տեսանյութ և տվյալներ) և մեկ սերիալ (UART/USB) հեռաչափական հոսք.
Օդային միավորի պահանջներ:
Յուրաքանչյուր Datalink օդային միավոր (մեկ անօդաչու թռչող սարքի համար) պետք է համապատասխանի հետևյալ պարտադիր պահանջներին:
1. Միջերես & Նավահանգիստներ (նվազագույնը):
- 1 × UART նավահանգիստ (նվազագույնը). Այս նավահանգիստը պետք է օգտագործվի FCC-ին հեռաչափության/կառավարման միացման համար (Հեռաչափական պորտեր Telem1 / Telem2-ը FCC-ում).
- 1 × Ethernet պորտ (նվազագույնը). Այս պորտը պետք է օգտագործվի տեսախցիկի/որոնողի Ethernet-ի տվյալները ստանալու համար.
2. Մալուխային միացում (առաքվում է AirUnit-ով):
- 1 × UART մալուխ (առաջնային) - երկարությունը: 1.0 մ (± 5%). Մալուխը պետք է կրի TX, RX, GND և VCC. Մալուխը պետք է ավարտվի այնպես, որ մի ծայրում համապատասխանի Datalink UART միակցիչին, մյուս կողմից՝ FCC հեռաչափության միակցիչին:.
- 1 × Ethernet մալուխ (առաջնային) - երկարությունը: 1.0 մ (± 5%). Մալուխը պետք է լինի ստանդարտ պաշտպանված Cat5e կամ Cat6 մալուխ RJ45 միակցիչներով.
- 2 × պահեստային հավաքածուներ (մեկ օդային միավորի համար) — այսինքն., երկու լրացուցիչ UART մալուխ և երկու լրացուցիչ Ethernet մալուխներ պետք է մատակարարվեն յուրաքանչյուր օդային միավորի հետ (ընդհանուր մատակարարված միավորի համար = 3 UART մալուխներ, 3 Ethernet մալուխներ).
3. Մեխանիկական & Ֆիզիկական:
- Մալուխները պետք է լինեն գունավոր կոդավորված (խորհուրդ է տրվում) և ունեն հստակ ուղղության գծանշումներ, եթե ծայրամասերը սիմետրիկ չեն.
4. Էլեկտրական / Արձանագրություն:
Uart: Աջակցեք ընդհանուր baud տոկոսադրույքներին մինչև առնվազն 921600 bps. Տրամադրել օգտվողին- կարգավորելի UART պարամետրեր.
Ethernet- ը: Աջակցեք գոնե 100 Մբիթ/վրկ գործողություն (Նախընտրելի է Գիգաբիթ). Աջակցեք ընդհանուր տրանսպորտային արձանագրություններին (UDP, RTSP վիդեո և UDP հսկողության համար) - հատուկ արձանագրության ընտրությունը պետք է կարգավորելի լինի.
Գրունտային միավորի պահանջներ:
Վերգետնյա ստորաբաժանումը կատարում է բոլոր չորս օդային ստորաբաժանումների տվյալների ապամուլտիպլեքսացիա և ներկայացնում է միասնական ինտերֆեյս GCS-ին:. Պարտադիր պահանջներն են:
1. Միջերես & Նավահանգիստներ (նվազագույնը):
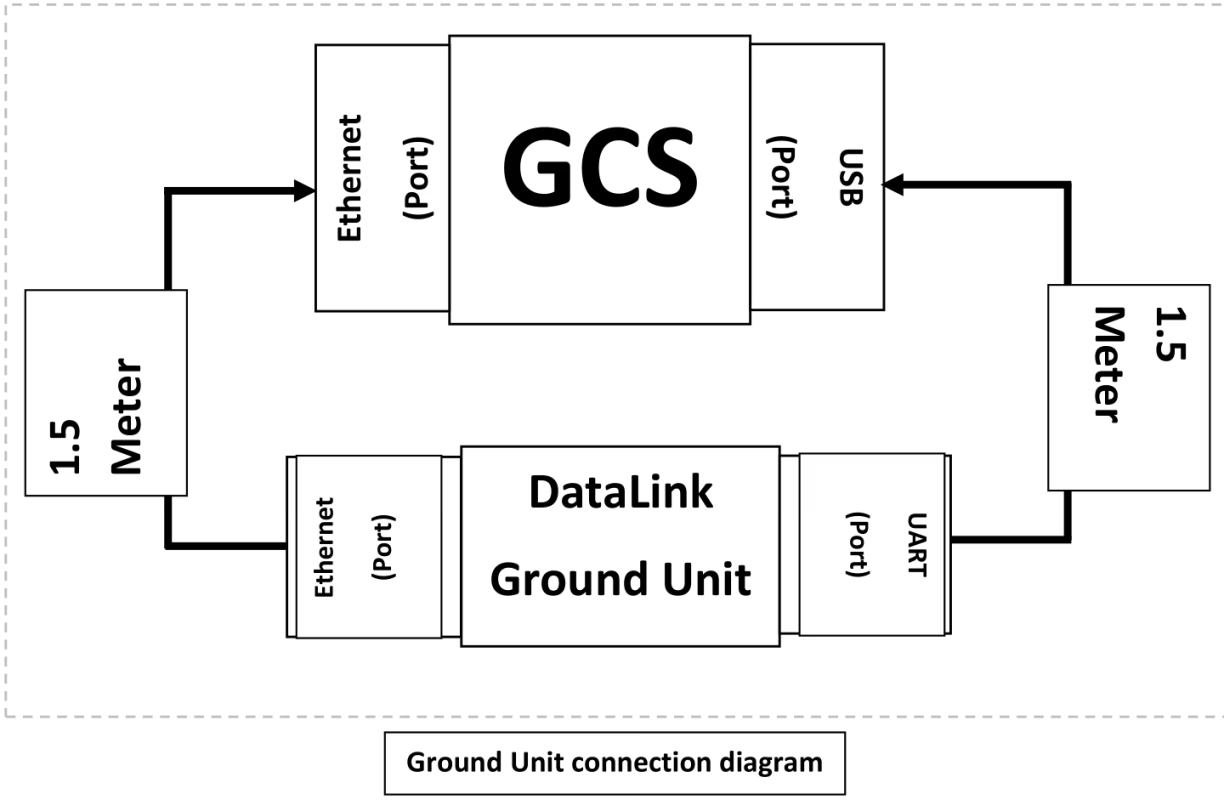
- 1 × UART նավահանգիստ (ներկայացվել է ԳԿՀ-ին). Վերգետնյա ստորաբաժանումը պետք է համախմբի հեռաչափական հոսքերը բոլոր չորս օդային ստորաբաժանումներից և դրանք ներկայացնի GCS որպես մեկ UART/USB ինտերֆեյս: (Է.Գ., վերգետնյա միավոր UART-ը միացված է GCS-ի USB ինտերֆեյսին).
- 1 × Ethernet պորտ (ներկայացվել է ԳԿՀ-ին). Վերգետնյա ստորաբաժանումը պետք է համախմբի տեսախցիկների/տեսանյութերի և տվյալների հոսքերը չորս օդային ստորաբաժանումներից և դրանք ներկայացնի որպես մեկ Ethernet ինտերֆեյս GCS-ին:.
2. Ագրեգացիոն վարքագիծ:
- Վերգետնյա ստորաբաժանումը պետք է ընդունի չորս անկախ մուտքային տվյալների հոսքեր (յուրաքանչյուր օդային միավորից մեկը) և ապամուլտիպլեքսացրեք դրանք համակցված Ethernet հոսքի և համակցված սերիական հոսքի. GCS-ից’ հեռանկարում պետք է լինի միայն մեկ Ethernet կապ և մեկ UART հղում կարգավորելու և վերահսկելու համար.
- Ագրեգացումը պետք է պահպանի աղբյուրի հասցեավորումը, այնպես որ GCS-ը կարող է որոշել, թե որ հոսքը որ թռչունից է. Ցամաքային ստորաբաժանումը չպետք է կորցնի յուրաքանչյուր թռչնի նույնականացման տեղեկատվությունը.
3. Մալուխային միացում (առաքվել է վերգետնյա ստորաբաժանման հետ):
- 1 × UART մալուխ (առաջնային) - երկարությունը: 400 մմ (0.4 մ). Մալուխը պետք է թույլ տա միանալ վերգետնյա միավորի UART միացքից GCS USB պորտին (եթե վերգետնյա ստորաբաժանման UART-ը ուղղակի UART է, ապահովել USB-UART ադապտեր մալուխ). Մալուխը պետք է ունենա TX, RX, GND և VCC.
- 1 × Ethernet մալուխ (առաջնային) - երկարությունը: 400 մմ (0.4 մ). Մալուխը պետք է պաշտպանված լինի Cat5e/Cat6 կարկատանային մալուխով RJ45 միակցիչներով.
- 2 × պահեստային հավաքածուներ — երկու լրացուցիչ UART և երկու լրացուցիչ Ethernet մալուխներ, որոնք մատակարարվում են որպես պահեստային ցամաքային միավորի հետ.
4. Էլեկտրական / Արձանագրություն:
- Համախմբումը պետք է թափանցիկ լինի տեսանյութի համար նախատեսված Ethernet շրջանակների նկատմամբ; անհրաժեշտության դեպքում, վերգետնյա ստորաբաժանումը կարող է վերափաթեթավորել հոսքերը մեկ տրանսպորտային հոսքի մեջ, սակայն պետք է պահպանի ժամանակի մասին տեղեկատվությունը և յուրաքանչյուր թռչնի աղբյուրի նույնականացումը:.
Հեռուստաչափական մուլտիպլեքսավորում: Վերգետնյա ստորաբաժանումը ժամանակի բազմապատկում կամ փաթեթավորում է հեռաչափական հոսքերը մեկ UART հոսքի մեջ՝ հստակ շրջանակներով և ընտրովի պիտակներով՝ հաղորդագրությունները թռչնի ID-ով տարբերակելու համար:. Մուլտիպլեքսավորման համար օգտագործվող արձանագրությունը պետք է փաստաթղթավորվի և ապահովված լինի GCS ծրագրաշարով.
Միացում & Մալուխի բնութագրերը
Այս բաժնում թվարկված են մալուխի և միակցիչի առաջարկվող բնութագրերը՝ օդային և ցամաքային միջավայրում հուսալի աշխատանք ապահովելու համար.
- Ethernet մալուխներ (Օդային միավոր -> Տեսախցիկ և վերգետնյա միավոր -> GCS): Ստանդարտ պաշտպանված Cat5e կամ Cat6 կարկատանային մալուխներ RJ45 վերջավորություններով. Օգտագործեք ամբողջովին պաշտպանված (STP) մալուխ, եթե տեղադրումն ունի բարձր EMI.
- Ethernet- ը երկարությունը (Օդ Միավոր): 1.0 մ ±5%.
- Ethernet- ը երկարությունը (Գետնին Միավոր): 400 մմ ±5%.
- UART մալուխներ (Օդային միավոր -> FCC հեռաչափություն): 4-հաղորդիչ մալուխ (Տեխաս, RX, GND, կամընտիր RTS/CTS). Երկարությունը: 1.0 մ ±5%.
- Uart մալուխ (Գետնին Միավոր -> GCS USB/UART): 400 մմ ±5% (ներառել USB-UART ադապտեր, եթե պահանջվում է GCS-ով).
- Մալուխի պաշտպանություն և հիմնավորում: Տրամադրեք ընդհանուր հիմք և համոզվեք, որ պաշտպանությունը մի ծայրով ավարտված է լավագույն պրակտիկայի համար՝ հողի հանգույցներից խուսափելու համար. Օգտագործեք կողպող RJ45 կամ փակող միակցիչներ, եթե սպասվում է թրթռում.
Տրամադրեք ադապտերային մալուխներ Datalink UART-ին CUAV V5+ հեռաչափական միակցիչներին միացնելու համար (եթե Datalink միավորը բնօրինակ կերպով չի բացահայտում համատեղելի միակցիչը).
- Որտեղ տեսախցիկը աջակցում է Power-over-Ethernet-ին (Պոունդ) բայց Datalink օդային միավորը չի մատակարարում PoE, ապահովել PoE ներարկիչ.
Ֆունկցիոնալ & Արձանագրության պահանջներ
Հիմնական ֆունկցիոնալ պահանջներ և առաջարկություններ:
- Մեկ թռչունի նույնականացում: Յուրաքանչյուր տվյալների հոսք (Տեսանյութ կամ հեռաչափություն) ՊԵՏՔ Է պիտակվի եզակի Bird ID-ով, որպեսզի GCS-ը կարողանա փոխադրամիջոցների հոսքերը քարտեզագրել.
- Մուլտիպլեքսավորում Սխեման: Վերգետնյա ստորաբաժանումը պետք է իրականացնի հեռաչափության դետերմինիստական մուլտիպլեքսավորման սխեմա (Uart) թույլ տալով GCS-ին վերլուծել և ուղղորդել հաղորդագրությունները Bird ID-ով.
- Լատենտություն իսկ թողունակությունը: Համակարգը պետք է նվազագույնի հասցնի լրացուցիչ ագրեգացման հետաձգումը.
- Հուսալիություն: Ցամաքային ստորաբաժանումը պետք է նրբանկատորեն կարգավորի մեկ կամ մի քանի օդային ստորաբաժանումների ժամանակավոր կորուստները և շարունակի ներկայացնել մնացած հոսքերը GCS-ին:.
- Կազմաձևման ինտերֆեյս: Տրամադրեք կազմաձևման մեթոդ (մանրամասն փաստաթուղթ) Թռչունների ID-ներ սահմանելու համար, UART baud դրույքաչափերը, and per-stream priorities.
Հարց տվեք
Ձեր հաղորդագրությունն ուղարկվել է