Огляд системи зв’язку БПЛА
The Система зв’язку БПЛА призначений для забезпечення надійності, спілкування в реальному часі, КОНТРОЛЬ, і моніторинг кількох безпілотних літальних апаратів (БЛА). Система складається з чотирьох БПЛА, кожен оснащений a Datalink Air Unit, a Комп'ютер управління польотом (FCC, Напр., НЕПРАВИЛЬНЕ V5+), і камера/шукач, а також a Наземний блок лінії передачі даних підключений до a Наземна станція управління (GCS).
Ключові характеристики
- Конфігурація: 1 Наземний підрозділ спілкується з 4 Повітряні підрозділи через двонаправлене з’єднання «точка-багато точок». (Ethernet + UART).
- Діапазон & Продуктивність: ≥ 80 кілометрів прямої видимості з надійними відео та телеметричними зв’язками, підтримує відео 1080p 30 частота кадрів/с і дані телеметрії/контролю зі швидкістю до 921600 біт/с.
- Інтерфейси: Повітряні підрозділи забезпечують 1 Порт UART для телеметрії FCC і 1 Порт Ethernet для даних камери. Наземний блок агрегує ці потоки та представляє єдиний інтерфейс UART та Ethernet для GCS.
- Кабель & Електропроводка: Прямі з'єднання TTL UART мінімізують затримку та складність. Кабелі Ethernet підтримують стандартні з’єднання Cat5e/Cat6 із екрануванням для захисту від електромагнітних перешкод.
- Надійність & Латентність: Частота бітових помилок < 8×10⁻⁸, затримка даних < 1 РС, втрата пакетів < 1%, з FEC, CRC, і механізми ARQ для забезпечення безперервної роботи.
- Гнучкість системи: Кожен потік даних позначається унікальним ідентифікатором птиці, дозволяючи GCS ідентифікувати окремі БПЛА та керувати ними. Система продовжує працювати, навіть якщо один або кілька БПЛА тимчасово втрачають зв'язок.
Ця система зв’язку даних забезпечує безперебійну інтеграцію між БПЛА, камери, і наземний контроль, забезпечуючи легкий, високоефективне рішення для операцій із декількома дронами в реальному часі.
Документи вимог до лінії передачі даних
Система складається з шістнадцяти повітряних блоків Datalink Air (по одному на птаха), один наземний блок Datalink, і наземна станція управління (GCS). Мета полягає в тому, щоб визначити інтерфейси, довжини кабелю, кількість портів, і приймальні випробування, щоб пристрої, що постачаються постачальниками, взаємодіяли з існуючою FCC (комп'ютер управління польотом), камери (шукачі), і GCS.
Потрібне комплексне рішення для встановлення зв’язку даних між a землю станція і 4 БПЛА повітря одиниць. Система повинна забезпечувати надійний зв'язок, КОНТРОЛЬ, і моніторинг усіх БПЛА одночасно. Детальні технічні вимоги наведені нижче.
Огляд:
- Конфігурація: 1 × Наземний блок управління (GCU) спілкуючись з 4 × Повітряні одиниці (з)
- Тип зв'язку: Двонаправлене з’єднання «точка-багато точок». (Ethernet + UART)
- Діапазон: ≥ 80 км прямої видимості (LOS)
- Робочий діапазон: 1.4ГГц(L-діапазон)
- Схема модуляції: TDD-OFDM / QPSK / 16-QAM
- Вимоги до живлення: робоча напруга (12V), Порогове значення струму (≤2A)
- Діапазон температур: -20°C до 75 °C
Пропускна здатність даних і пропускна здатність:
| Параметр | Вимога | Примітки |
| Швидкість передачі даних відео (на шукача) | 5 - 9 Мбіт / с | 1080p @ 30 fps стиснення H.264/265 |
| Телеметрія + КОНТРОЛЬ (відповідно до FCC) | 200 - 300 кбіт / с | Двонаправлені дані керування на основі UART |
| Сукупна пропускна здатність відео (4 з) | 24 - 36 Мбіт / с | Комбіноване відео вгору |
| Сукупна телеметрія/контроль | 1 Мбіт / с | Незначно порівняно з відео |
| Загальна необхідна пропускна здатність висхідної лінії зв’язку | ≥ 36 Мбіт / с | с 20% ПЕК + накладні витрати ≈ 42 Мбіт / с |
Затримка та вимоги до якості:
| Параметр | Вимога | Примітки |
| Рівень бітових помилок | < 8×10-8 | На максимальному діапазоні |
| Затримка даних | < 1РС | Необхідний для роботи шукача в реальному часі та передачі даних |
| Втрата пакетів | < 1% | З FEC + Механізми ARQ |
| Виправлення помилок | ПЕК + CRC + ARQ | Обов'язковий для надійності телеметрії |
Бюджет посилання & Радіочастотні параметри:
| Параметр | Цільовий Значення | Примітки |
| Передавати потужність (Повітряний блок) | 4 – 5 W | – |
| Передавати потужність (Наземний блок) | 4 – 5 W | – |
| Виграш антени (Повітряний блок) | >3дБ | Діаграма спрямованості антени: Ізотропний |
| Виграш антени (Наземний блок) | 12 - 18 дБ | Спрямована антена |
| Чутливість приймача | –103 дБм при 10 МГц | За 10⁻⁵ BER |
| Поле посилання @ 80 км | > 10 дБ | Забезпечує надійне відео + посилання даних |
ПРИМІТКА:
- Для бездоганної інтеграції між контролером польоту CUAV V5+ і зовнішніми периферійними пристроями, дуже важливо, щоб станок UART підтримував a пряма і нескладна структура проводки. Конкретно, ткацький верстат від порту UART має бути розроблений як a єдине пряме підключення без введення будь-яких додаткових перетворювачів або проміжних плат. Це мінімізує потенційні точки відмови, зменшує затримку, і забезпечує легку та надійну архітектуру проводки.
- Крім того, ткацький верстат повинен працювати за транзисторно-транзисторною логікою (TTL) рівні напруги, оскільки контролер польоту V5+ спілкується через TTL UART. Будь-які відхилення від TTL (наприклад рівні RS-232 або RS-485) вимагатиме зовнішніх перемикачів або перетворювачів рівня, що суперечить вимозі прямого ткацького верстата. Дотримуючись стандартів TTL, зберігається сумісність сигналу, забезпечення:
- Прямий зв'язок між V5+ і підключеними модулями.
- Зменшена апаратна складність за рахунок усунення перетворювачів або трансляторів.
- Менша вага та підвищена надійність, оскільки на шляху сигналу задіяно менше компонентів.
- Покращена цілісність сигналу, оскільки додаткові етапи перетворення можуть викликати шум або невідповідність часу.
- Крім того, ткацький верстат повинен працювати за транзисторно-транзисторною логікою (TTL) рівні напруги, оскільки контролер польоту V5+ спілкується через TTL UART. Будь-які відхилення від TTL (наприклад рівні RS-232 або RS-485) вимагатиме зовнішніх перемикачів або перетворювачів рівня, що суперечить вимозі прямого ткацького верстата. Дотримуючись стандартів TTL, зберігається сумісність сигналу, забезпечення:
На закінчення,конструкція верстата повинна суворо забезпечувати прямий джгут проводів UART, що працює при напрузі TTL,відповідність електричним специфікаціям CUAV V5+ і гарантування оптимальної продуктивності в бортових застосуваннях.
Огляд системи:
Опис системи високого рівня:
- Чотири БПЛА, кожен оснащений:
- 1 × Datalink Air Unit
- 1 × FCC (Комп'ютер управління польотом, Напр., НЕПРАВИЛЬНЕ V5+)
- 1 × Шукач / Камера
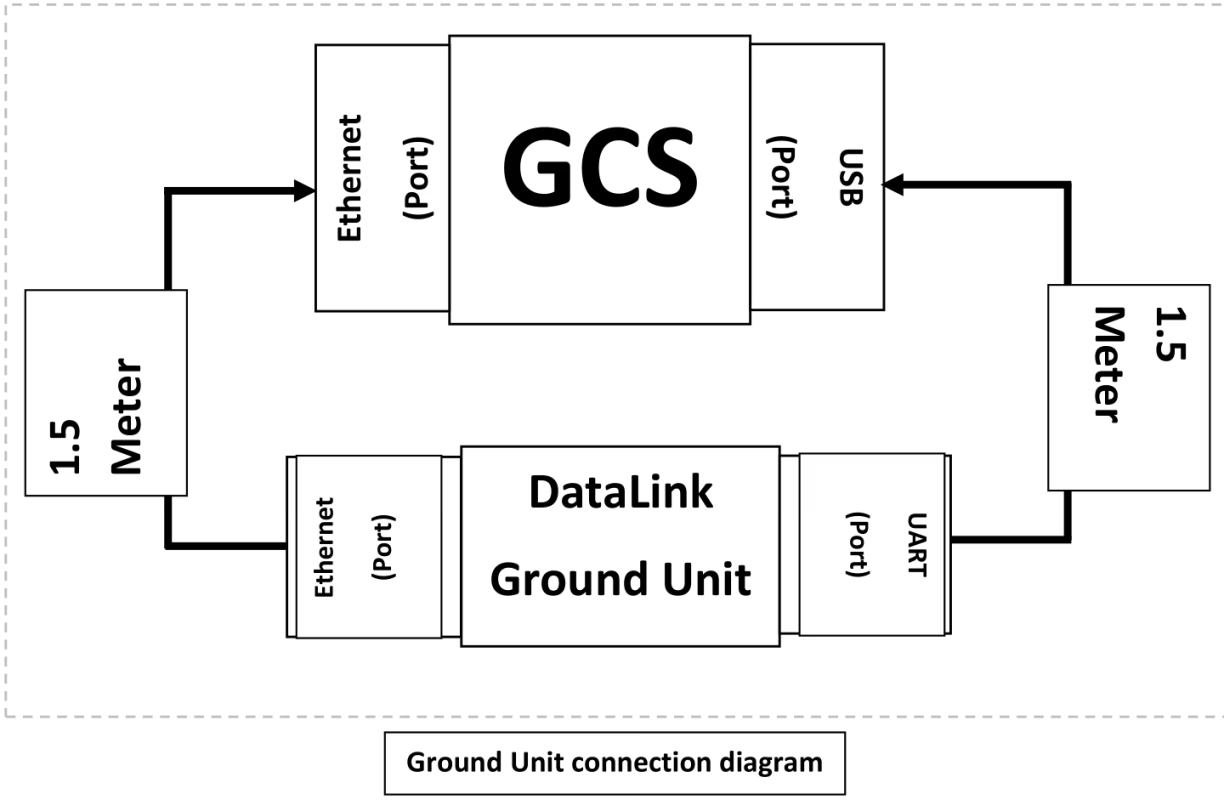
- 1 × Наземний блок Datalink, підключений до наземної станції керування (GCS).
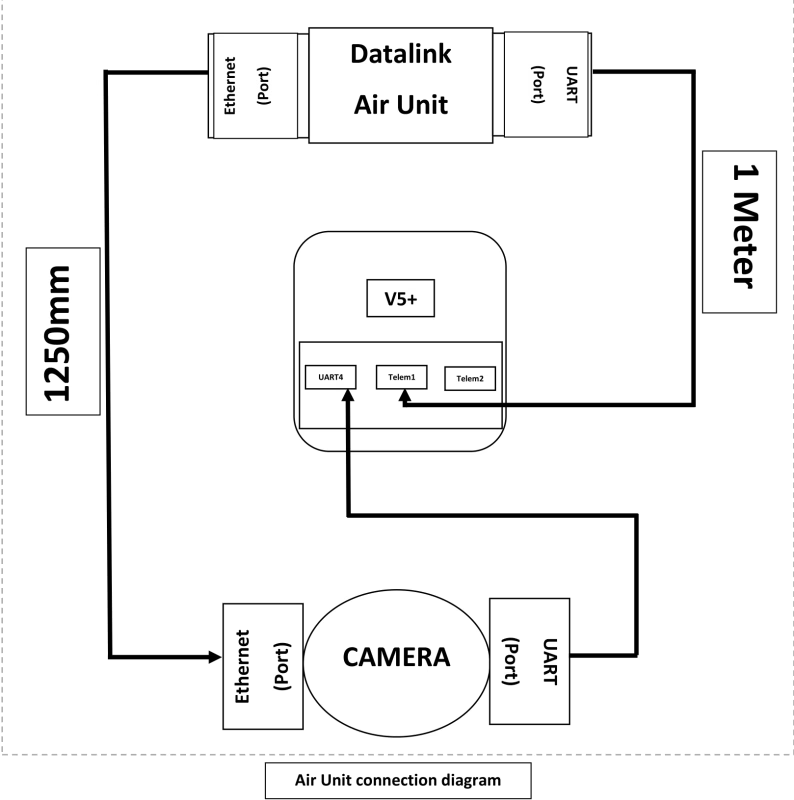
Потік даних (огляд): Відео та дані датчиків з кожної камери передаються до пов’язаного з нею повітряного блоку Datalink через порт Ethernet камери. Дані телеметрії та керування між FCC і Air Unit передаються через UART. Повітряний блок Datalink передає ці потоки через канал передачі даних до наземного блоку; Наземний блок демультиплексує потоки та представляє їх GCS як єдиний потік Ethernet (відео та дані камери) і один серіал (UART/USB) телеметричний потік.
Вимоги до повітряної установки:
Кожен повітряний блок Datalink (по одному на БПЛА) повинен відповідати наступним обов'язковим вимогам:
1. Інтерфейси & Порти (мінімум):
- 1 × порт UART (мінімум). Цей порт має використовуватися для телеметричного/контрольного підключення до FCC (телеметричні порти Telem1 / Telem2 на FCC).
- 1 × порт Ethernet (мінімум). Цей порт використовується для отримання даних Ethernet камери/шукача.
2. Підключення кабелем (поставляється з AirUnit):
- 1 × кабель UART (первинний) — довжина: 1.0 м (± 5%). Кабель повинен передавати TX, RX, GND і VCC. Кабель має бути завершений відповідно до роз’єму Datalink UART на одному кінці та телеметричного роз’єму FCC на іншому.
- 1 × кабель Ethernet (первинний) — довжина: 1.0 м (± 5%). Кабель має бути стандартним екранованим комутаційним кабелем Cat5e або Cat6 із роз’ємами RJ45.
- 2 × запасні комплекти (за повітряну одиницю) — тобто, два додаткових кабелі UART і два додаткові кабелі Ethernet повинні постачатися з кожним Air Unit (загальна кількість поставлених одиниць = 3 кабелі UART, 3 Кабелі Ethernet).
3. Механічний & фізичний:
- Кабелі повинні мати кольорове кодування (рекомендований) і мають чіткі позначки спрямованості, якщо контакти не симетричні.
4. Електричний / Протокол:
UART: Підтримка загальної швидкості передачі принаймні до 921600 біт/с. Надати користувача- настроювані параметри UART.
Ethernet: Підтримати хоча б 100 Операція Мбіт/с (Бажано гігабіт). Підтримка загальних транспортних протоколів (UDP, RTSP для відео та UDP для керування) — конкретний вибір протоколу має бути конфігурованим.
Вимоги до наземного пристрою:
Наземний блок виконує демультиплексування даних з усіх чотирьох повітряних блоків і представляє уніфікований інтерфейс для GCS. Обов'язковими вимогами є:
1. Інтерфейси & Порти (мінімум):
- 1 × порт UART (представлені до GCS). Наземний блок повинен об’єднувати потоки телеметрії від усіх чотирьох повітряних блоків і надавати їх GCS як єдиний інтерфейс UART/USB (Напр., UART наземного блоку, підключеного до інтерфейсу USB на GCS).
- 1 × порт Ethernet (представлені до GCS). Наземний блок повинен об’єднувати камери/відео та потоки даних від чотирьох повітряних блоків і представляти їх як єдиний інтерфейс Ethernet до GCS.
2. Агрегаційна поведінка:
- Наземний блок приймає чотири незалежні вхідні потоки даних (по одному від кожного повітряного підрозділу) і демультиплексувати їх до комбінованого потоку Ethernet і комбінованого послідовного потоку. З GCS’ у перспективі має бути лише одне з’єднання Ethernet і одне з’єднання UART для налаштування та моніторингу.
- Агрегація повинна зберігати адресацію джерела, тому GCS може визначити, який потік від якого Bird. Наземний підрозділ не повинен втрачати ідентифікаційну інформацію для кожного птаха.
3. Підключення кабелем (поставляється з наземним блоком):
- 1 × кабель UART (первинний) — довжина: 400 мм (0.4 м). Кабель має забезпечувати підключення від порту UART наземного блоку до порту USB GCS (якщо UART наземного пристрою є прямим UART, надайте перехідний кабель USB-UART). Кабель повинен передавати TX, RX, GND і VCC.
- 1 × кабель Ethernet (первинний) — довжина: 400 мм (0.4 м). Кабель має бути екранованим комутаційним кабелем Cat5e/Cat6 із роз’ємами RJ45.
- 2 × запасні комплекти — два додаткові кабелі UART і два додаткові кабелі Ethernet, що постачаються як запасні частини разом із наземним блоком.
4. Електричний / Протокол:
- Агрегація має бути прозорою щодо кадрів Ethernet для відео; у разі потреби наземний пристрій може перепакувати потоки в єдиний транспортний потік, але має зберегти інформацію про час та ідентифікацію джерела для кожного птаха.
Мультиплексування телеметрії: Наземний блок мультиплексує або пакетує телеметричні потоки в єдиний потік UART із чітким кадруванням і додатковими тегами для розрізнення повідомлень за ідентифікатором птаха. Протокол, який використовується для мультиплексування, має бути задокументований і підтримуватися програмним забезпеченням GCS.
Підключення & Технічні характеристики кабелю
У цьому розділі наведено рекомендовані технічні характеристики кабелів і з’єднувачів для забезпечення надійної роботи в повітряному та наземному середовищах.
- Кабелі Ethernet (Повітряний блок -> Камера і наземний блок -> GCS): Стандартні екрановані комутаційні кабелі Cat5e або Cat6 з кінцевими роз’ємами RJ45. Використовуйте повністю екранований (STP) кабель, якщо установка має високі електромагнітні перешкоди.
- Ethernet довжина (повітря Одиниця): 1.0 m ±5%.
- Ethernet довжина (Земля Одиниця): 400 мм ±5%.
- кабелі UART (Air Unit -> Телеметрія FCC): 4-провідний кабель (TX, RX, GND, додатковий RTS/CTS). Довжина: 1.0 m ±5%.
- UART кабель (Земля Одиниця -> GCS USB/UART): 400 мм ±5% (включити адаптер USB-UART, якщо цього вимагає GCS).
- Екранування та заземлення кабелю: Забезпечте спільне заземлення та переконайтеся, що екранування закінчено на одному кінці відповідно до найкращих практик, щоб уникнути петель заземлення. Якщо очікується вібрація, використовуйте роз’єми RJ45 із фіксацією або фіксаторами.
Надайте кабелі-перехідники для підключення телеметричних роз’ємів Datalink UART до CUAV V5+ (якщо блок Datalink не надає початкового доступу до сумісного роз’єму).
- Де камера підтримує Power-over-Ethernet (Пой) але Air Unit Datalink не забезпечує PoE, забезпечити інжектор PoE.
Функціональний & Вимоги до протоколу
Основні функціональні вимоги та рекомендації:
- Ідентифікація кожного птаха: Кожен потік даних (відео або телеметрія) ПОВИНЕН бути позначений унікальним ідентифікатором птиці, щоб GCS міг відображати потоки транспортних засобів.
- Мультиплексування схема: Наземний блок має реалізувати детерміновану схему мультиплексування для телеметрії (UART) дозволяючи GCS аналізувати та маршрутизувати повідомлення за Bird ID.
- Латентність і Пропускна здатність: Система повинна мінімізувати додаткову затримку агрегації.
- Надійність: Наземний підрозділ повинен акуратно впоратися з тимчасовою втратою одного або кількох повітряних блоків і продовжувати надавати решту потоків до GCS.
- Інтерфейс конфігурації: Укажіть метод конфігурації (докладний документ) щоб встановити ідентифікатори птахів, Швидкість передачі UART, і пріоритети для кожного потоку.
Задавати питання
Дякуємо за вашу відповідь. ✨