Tổng quan về hệ thống liên kết dữ liệu UAV
Các Hệ thống liên kết dữ liệu UAV được thiết kế để cho phép đáng tin cậy, giao tiếp thời gian thực, điều khiển, và giám sát nhiều máy bay không người lái (Uavs). Hệ thống bao gồm bốn UAV, mỗi người được trang bị một Đơn vị không khí Datalink, Một Máy tính điều khiển chuyến bay (FCC, VÍ DỤ., SAI V5+), và một máy ảnh/người tìm kiếm, cũng như một Đơn vị mặt đất Datalink kết nối với một Trạm điều khiển mặt đất (GCS).
Các tính năng chính
- Cấu hình: 1 Đơn vị mặt đất liên lạc với 4 Các đơn vị không quân thông qua liên kết hai chiều điểm-đa điểm (Ethernet + UART).
- Phạm vi & Hiệu suất: ≥ 80 km tầm nhìn với các liên kết đo từ xa và video mạnh mẽ, hỗ trợ video 1080p tại 30 fps và dữ liệu đo từ xa/điều khiển lên tới 921600 HA.
- Giao diện: Đơn vị không quân cung cấp 1 Cổng UART cho phép đo từ xa của FCC và 1 Cổng Ethernet cho dữ liệu camera. Đơn vị mặt đất tổng hợp các luồng này và trình bày một giao diện UART và Ethernet duy nhất cho GCS.
- Cáp & Đấu dây: Kết nối TTL UART xuyên suốt giảm thiểu độ trễ và độ phức tạp. Cáp Ethernet hỗ trợ kết nối Cat5e/Cat6 tiêu chuẩn có lớp chắn để bảo vệ EMI.
- Độ tin cậy & Độ trễ: Tỷ lệ lỗi bit < 8×10⁻⁸, độ trễ dữ liệu < 1 bệnh đa xơ cứng, mất gói < 1%, với FEC, CRC, và cơ chế ARQ để đảm bảo hoạt động liên tục.
- Tính linh hoạt của hệ thống: Mỗi luồng dữ liệu được gắn thẻ ID chim duy nhất, cho phép GCS xác định và quản lý các UAV riêng lẻ. Hệ thống tiếp tục hoạt động ngay cả khi một hoặc nhiều UAV tạm thời mất kết nối.
Hệ thống Datalink này đảm bảo tích hợp liền mạch giữa các UAV, máy ảnh, và điều khiển mặt đất, cung cấp một trọng lượng nhẹ, giải pháp hiệu suất cao cho hoạt động đa máy bay không người lái trong thời gian thực.
Tài liệu yêu cầu liên kết dữ liệu
Hệ thống này bao gồm mười sáu Đơn vị Không quân Datalink trên không (một con chim), một đơn vị mặt đất Datalink duy nhất, và Trạm điều khiển mặt đất (GCS). Mục đích là để xác định giao diện, chiều dài cáp, số cổng, và các thử nghiệm chấp nhận để các thiết bị do nhà cung cấp giao sẽ tương tác với FCC hiện có (máy tính điều khiển chuyến bay), máy ảnh (người tìm kiếm), và GCS.
Cần có một giải pháp hoàn chỉnh để thiết lập liên kết dữ liệu giữa một đất ga tàu và 4 máy bay không người lái đơn vị. Hệ thống phải cho phép liên lạc đáng tin cậy, điều khiển, và giám sát tất cả các UAV cùng một lúc. Yêu cầu kỹ thuật chi tiết được cung cấp dưới đây.
Tổng quan:
- Cấu hình: 1 × Bộ điều khiển mặt đất (GCU) giao tiếp với 4 × Đơn vị không quân (Ra khỏi)
- Loại giao tiếp: Liên kết hai chiều điểm-đa điểm (Ethernet + UART)
- Phạm vi: ≥ 80 km tầm nhìn (CÁC)
- Ban điều hành: 1.4GHz(Băng tần L)
- Sơ đồ điều chế: TDD-OFDM / QPSK / 16-QAM
- Yêu cầu nguồn điện: điện áp hoạt động (12V), Ngưỡng hiện tại (2A)
- Phạm vi nhiệt độ: -20°C đến 75°C
Thông lượng dữ liệu và băng thông:
| Tham số | Yêu cầu | Ghi chú |
| Tốc độ dữ liệu video (mỗi người tìm kiếm) | 5 - 9 Mb / giây | 1080P @ 30 nén khung hình / giây H.264/265 |
| Đo từ xa + Điều khiển (theo FCC) | 200 - 300 kb / giây | Dữ liệu điều khiển hai chiều dựa trên UART |
| Thông lượng video tổng hợp (4 Ra khỏi) | 24 - 36 Mb / giây | Đường lên video kết hợp |
| Đo từ xa/Điều khiển tổng hợp | 1 Mb / giây | Không đáng kể so với video |
| Tổng băng thông đường lên yêu cầu | ≥ 36 Mb / giây | Với 20% FEC + trên cao ≈ 42 Mb / giây |
Yêu cầu về độ trễ và chất lượng:
| Tham số | Yêu cầu | Ghi chú |
| Tỷ lệ lỗi bit | < 8×10-8 | Ở phạm vi tối đa |
| Độ trễ dữ liệu | < 1bệnh đa xơ cứng | Cần thiết cho hoạt động tìm kiếm và truyền dữ liệu theo thời gian thực |
| Mất gói | < 1% | Với FEC + cơ chế ARQ |
| Sửa lỗi | FEC + CRC + ARQ | Bắt buộc về độ tin cậy của phép đo từ xa |
Ngân sách liên kết & Thông số RF:
| Tham số | Mục tiêu Giá trị | Ghi chú |
| Truyền năng lượng (Đơn vị không quân) | 4 – 5 W | – |
| Truyền năng lượng (Đơn vị mặt đất) | 4 – 5 W | – |
| Ăng -ten tăng (Đơn vị không quân) | >3dB | Mẫu ăng-ten: đẳng hướng |
| Ăng -ten tăng (Đơn vị mặt đất) | 12 - 18 dB | Anten định hướng |
| Độ nhạy của máy thu | –103dBm @10 MHz | Với giá 10⁻⁵ BER |
| Ký quỹ liên kết @ 80 km | > 10 dB | Đảm bảo video mạnh mẽ + liên kết dữ liệu |
GHI CHÚ:
- Để tích hợp liền mạch giữa bộ điều khiển chuyến bay CUAV V5+ và các thiết bị ngoại vi bên ngoài, điều cần thiết là máy dệt UART phải duy trì một cấu trúc dây trực tiếp và không phức tạp. Cụ thể, máy dệt từ cổng UART phải được thiết kế như một kết nối đường thẳng đơn mà không cần thêm bất kỳ bộ chuyển đổi hoặc bảng trung gian nào. Điều này giảm thiểu các điểm thất bại tiềm ẩn, giảm độ trễ, và đảm bảo kiến trúc hệ thống dây điện nhẹ và đáng tin cậy.
- Hơn nữa, máy dệt phải hoạt động theo logic Transistor-Transistor (TTL) cấp điện áp, khi bộ điều khiển bay V5+ giao tiếp qua TTL UART. Bất kỳ sai lệch nào so với TTL (chẳng hạn như mức RS-232 hoặc RS-485) sẽ cần có bộ chuyển đổi hoặc bộ chuyển đổi mức bên ngoài, điều này mâu thuẫn với yêu cầu của máy dệt trực tiếp. Bằng cách tuân thủ các tiêu chuẩn TTL, Khả năng tương thích tín hiệu được duy trì, đảm bảo:
- Giao tiếp trực tiếp giữa V5+ và các mô-đun được kết nối.
- Giảm độ phức tạp của phần cứng bằng cách loại bỏ bộ chuyển đổi hoặc trình dịch.
- Trọng lượng thấp hơn và độ tin cậy được cải thiện, vì có ít thành phần tham gia vào đường dẫn tín hiệu hơn.
- Cải thiện tính toàn vẹn tín hiệu, vì các giai đoạn chuyển đổi bổ sung có thể gây ra nhiễu hoặc thời gian không khớp.
- Hơn nữa, máy dệt phải hoạt động theo logic Transistor-Transistor (TTL) cấp điện áp, khi bộ điều khiển bay V5+ giao tiếp qua TTL UART. Bất kỳ sai lệch nào so với TTL (chẳng hạn như mức RS-232 hoặc RS-485) sẽ cần có bộ chuyển đổi hoặc bộ chuyển đổi mức bên ngoài, điều này mâu thuẫn với yêu cầu của máy dệt trực tiếp. Bằng cách tuân thủ các tiêu chuẩn TTL, Khả năng tương thích tín hiệu được duy trì, đảm bảo:
Tóm lại,thiết kế khung dệt phải cung cấp nghiêm ngặt dây nối UART xuyên suốt hoạt động ở điện áp TTL,phù hợp với thông số kỹ thuật điện CUAV V5+ và đảm bảo hiệu suất tối ưu trong các ứng dụng trên không.
Tổng quan về hệ thống:
Mô tả hệ thống cấp cao:
- Bốn chiếc UAV, mỗi người được trang bị:
- 1 × Đơn vị không khí Datalink
- 1 × FCC (Máy tính điều khiển chuyến bay, VÍ DỤ., SAI V5+)
- 1 × Người tìm kiếm / Máy ảnh
- 1 × Thiết bị mặt đất Datalink được kết nối với Trạm điều khiển mặt đất (GCS).
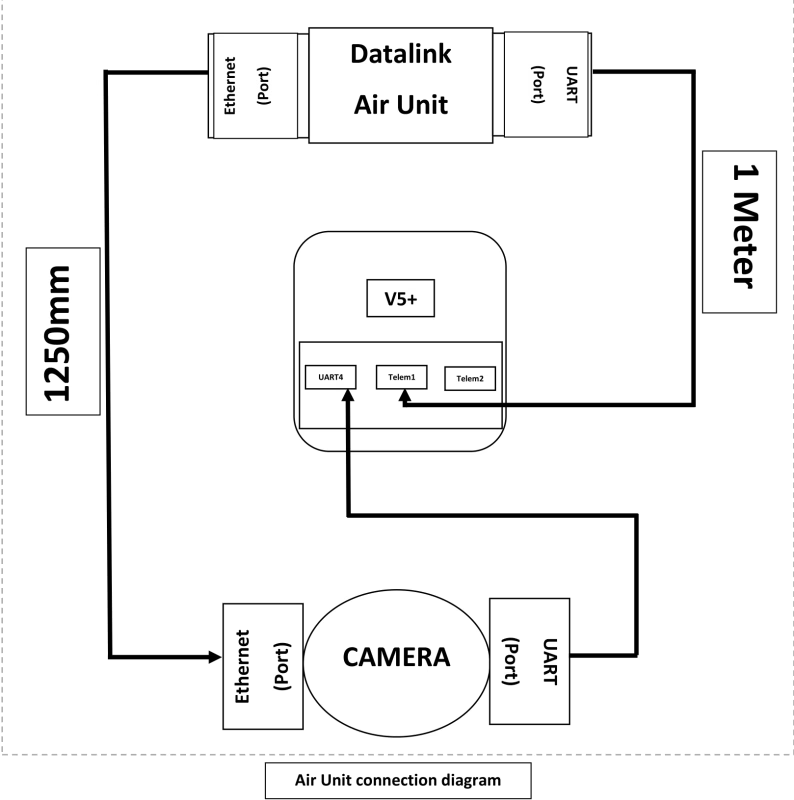
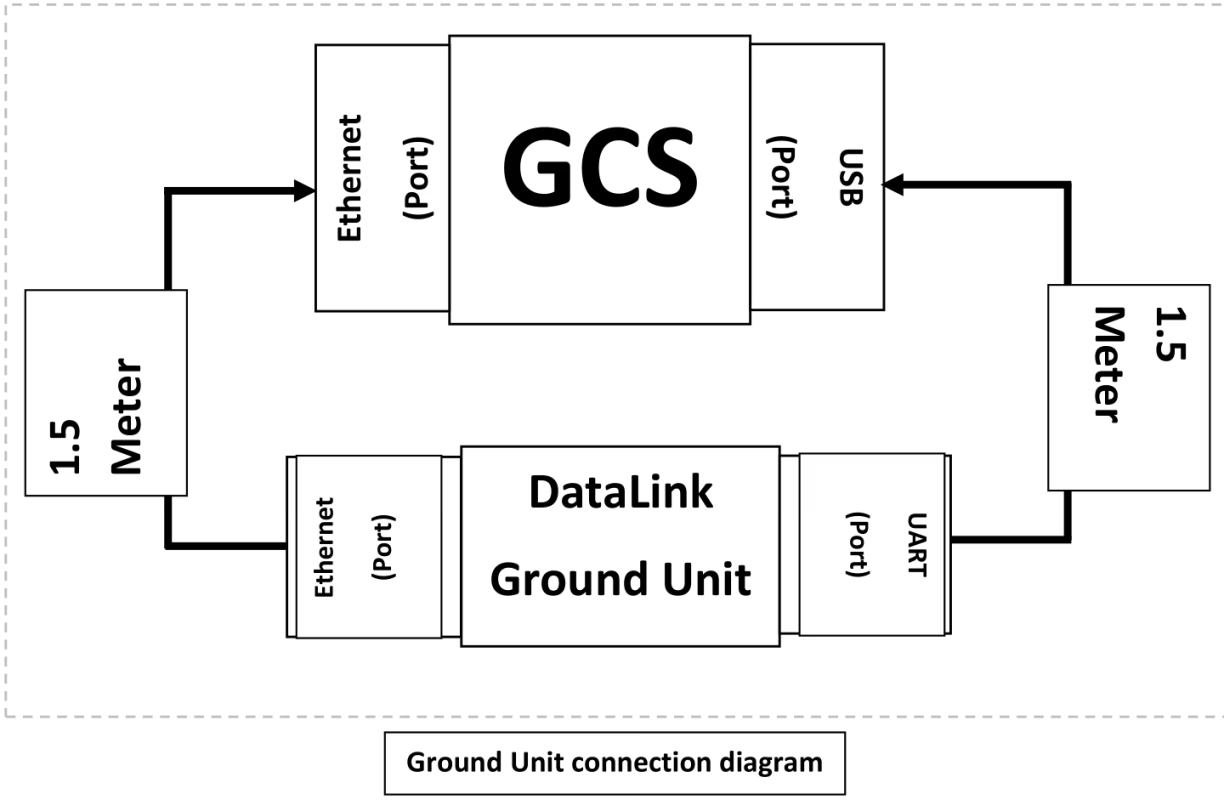
Luồng dữ liệu (Tổng quan): Dữ liệu video và cảm biến từ mỗi camera được cung cấp cho Thiết bị không khí Datalink liên kết của nó thông qua cổng Ethernet của camera. Dữ liệu điều khiển và đo từ xa giữa FCC và Air Unit được truyền qua liên kết UART. Thiết bị không khí Datalink truyền các luồng này qua liên kết dữ liệu đến Thiết bị mặt đất; Thiết bị mặt đất phân kênh các luồng và trình bày chúng cho GCS dưới dạng một luồng Ethernet duy nhất (dữ liệu và video camera) và một serial duy nhất (UART/USB) luồng đo từ xa.
Yêu cầu về đơn vị không quân:
Mỗi đơn vị không khí Datalink (một chiếc cho mỗi UAV) phải đáp ứng các yêu cầu bắt buộc sau:
1. Giao diện & Cổng (tối thiểu):
- 1 × cổng UART (tối thiểu). Cổng này sẽ được sử dụng để kết nối đo từ xa/điều khiển với FCC (cổng đo từ xa Telem1 / Telem2 trên FCC).
- 1 × cổng Ethernet (tối thiểu). This port shall be used to receive camera/seeker Ethernet data.
2. Kết nối cáp (được giao cùng với AirUnit):
- 1 ×Cáp UART (sơ đẳng) - chiều dài: 1.0 m (±5%). Cáp sẽ mang TX, RX, GND and VCC. Cable must be terminated to match the Datalink UART connector on one end and the FCC telemetry connector on the other.
- 1 × Cáp Ethernet (sơ đẳng) - chiều dài: 1.0 m (±5%). Cable shall be standard shielded Cat5e or Cat6 patch cable with RJ45 connectors.
- 2 × bộ dự phòng (mỗi đơn vị không khí) - tức là, two additional UART cables and two additional Ethernet cables shall be supplied with each Air Unit (total supplied per unit = 3 cáp UART, 3 Cáp Ethernet).
3. Cơ khí & Thuộc vật chất:
- Cables should be color-coded (khuyến khích) and have clear directionality markings if pinouts are not symmetric.
4. Điện / Giao thức:
UART: Hỗ trợ tốc độ truyền thông thường lên đến ít nhất 921600 HA. Provide user- configurable UART parameters.
Ethernet: Hỗ trợ ít nhất 100 Hoạt động Mbps (ưu tiên Gigabit). Support common transport protocols (UDP, RTSP cho video và UDP để điều khiển) — specific protocol selection shall be configurable.
Yêu cầu đơn vị mặt đất:
The Ground Unit performs demultiplexing of data from all four Air Units and presents a unified interface to the GCS. Yêu cầu bắt buộc là:
1. Giao diện & Cổng (tối thiểu):
- 1 × cổng UART (trình bày với GCS). Đơn vị Mặt đất sẽ tổng hợp các luồng đo từ xa từ cả bốn đơn vị trên không và hiển thị chúng cho GCS dưới dạng một giao diện UART/USB duy nhất (VÍ DỤ., UART của thiết bị mặt đất được kết nối với giao diện USB trên GCS).
- 1 × cổng Ethernet (trình bày với GCS). Đơn vị mặt đất sẽ tổng hợp các luồng camera/video và dữ liệu từ bốn đơn vị trên không và hiển thị chúng dưới dạng một giao diện Ethernet duy nhất cho GCS.
2. Hành vi tổng hợp:
- Đơn vị mặt đất sẽ chấp nhận bốn luồng dữ liệu đến độc lập (một từ mỗi đơn vị không quân) và phân kênh chúng thành luồng Ethernet kết hợp và luồng nối tiếp kết hợp. Từ GCS’ phối cảnh sẽ chỉ có một liên kết Ethernet và một liên kết UART để định cấu hình và giám sát.
- Việc tổng hợp phải bảo toàn địa chỉ nguồn, để GCS có thể xác định luồng nào đến từ Bird nào. Đơn vị Mặt đất sẽ không bị mất thông tin nhận dạng từng con chim.
3. Kết nối cáp (được giao cùng với Đơn vị Mặt đất):
- 1 ×Cáp UART (sơ đẳng) - chiều dài: 400 mm (0.4 m). Cáp sẽ cho phép kết nối từ cổng UART của Thiết bị Mặt đất đến cổng USB GCS (nếu UART đơn vị mặt đất là UART trực tiếp, cung cấp cáp chuyển đổi USB-UART). Cáp phải mang TX, RX, GND and VCC.
- 1 × Cáp Ethernet (sơ đẳng) - chiều dài: 400 mm (0.4 m). Cáp phải là cáp vá Cat5e/Cat6 được bảo vệ với đầu nối RJ45.
- 2 × bộ dự phòng — hai cáp UART bổ sung và hai cáp Ethernet bổ sung được cung cấp dưới dạng phụ tùng kèm theo Bộ nối đất.
4. Điện / Giao thức:
- Việc tổng hợp phải trong suốt đối với các khung Ethernet dành cho video; khi cần, Đơn vị Mặt đất có thể đóng gói lại các luồng thành một luồng truyền tải duy nhất nhưng phải lưu giữ thông tin về thời gian và nhận dạng nguồn của mỗi loài chim.
Ghép kênh từ xa: Đơn vị mặt đất sẽ ghép kênh thời gian hoặc đóng gói các luồng đo từ xa thành một luồng UART duy nhất với khung rõ ràng và các thẻ tùy chọn để phân biệt các thông báo theo ID chim. Giao thức được sử dụng để ghép kênh phải được ghi lại và hỗ trợ bởi phần mềm GCS.
Kết nối & Thông số kỹ thuật cáp
Phần này liệt kê các thông số kỹ thuật của cáp và đầu nối được đề xuất để đảm bảo hiệu suất đáng tin cậy trong môi trường trên không và trên mặt đất.
- Cáp Ethernet (Đơn vị không quân -> Camera và đơn vị mặt đất -> GCS): Cáp vá Cat5e hoặc Cat6 được bảo vệ tiêu chuẩn có đầu cuối RJ45. Sử dụng được che chắn hoàn toàn (STP) cáp nếu cài đặt có EMI cao.
- Ethernet chiều dài (Không khí Đơn vị): 1.0 m ±5%.
- Ethernet chiều dài (Đất Đơn vị): 400 mm ±5%.
- cáp UART (Đơn vị không quân -> Đo từ xa của FCC): 4-cáp dẫn (TX, RX, GND, RTS/CTS tùy chọn). Chiều dài: 1.0 m ±5%.
- UART cáp (Đất Đơn vị -> GCS USB/UART): 400 mm ±5% (bao gồm bộ chuyển đổi USB-UART nếu GCS yêu cầu).
- Bảo vệ cáp và nối đất: Cung cấp điểm chung và đảm bảo lớp che chắn được kết thúc ở một đầu theo cách thực hành tốt nhất để tránh vòng lặp trên mặt đất. Sử dụng khóa đầu nối RJ45 hoặc chốt nếu có khả năng rung.
Cung cấp cáp chuyển đổi để kết nối đầu nối từ xa Datalink UART với CUAV V5+ (nếu thiết bị Datalink thực sự không có đầu nối tương thích).
- Trường hợp camera hỗ trợ Power-over-Ethernet (PoE) nhưng Thiết bị không khí Datalink không cung cấp PoE, cung cấp đầu phun PoE.
Chức năng & Yêu cầu giao thức
Các yêu cầu và đề xuất chức năng chính:
- Nhận dạng mỗi con chim: Mỗi luồng dữ liệu (video hoặc đo từ xa) PHẢI được gắn thẻ ID chim duy nhất để GCS có thể ánh xạ các luồng tới các phương tiện.
- Ghép kênh Cơ chế: Đơn vị mặt đất sẽ triển khai sơ đồ ghép kênh xác định cho phép đo từ xa (UART) cho phép GCS phân tích và định tuyến tin nhắn bằng Bird ID.
- Độ trễ và Thông lượng: Hệ thống sẽ giảm thiểu độ trễ tổng hợp bổ sung.
- Độ tin cậy: Đơn vị mặt đất phải xử lý việc mất tạm thời một hoặc nhiều đơn vị không quân một cách khéo léo và tiếp tục trình bày các luồng còn lại cho GCS.
- Giao diện cấu hình: Cung cấp phương pháp cấu hình (một tài liệu chi tiết) để đặt ID chim, Tốc độ truyền UART, và mức độ ưu tiên trên mỗi luồng.
Đặt một câu hỏi
Tin nhắn của bạn đã được gửi