 | Plane, UAV, 무인 비행기 |
 | Helicopter |
 | Ground Control Station |
 | Remote Control Sbus |
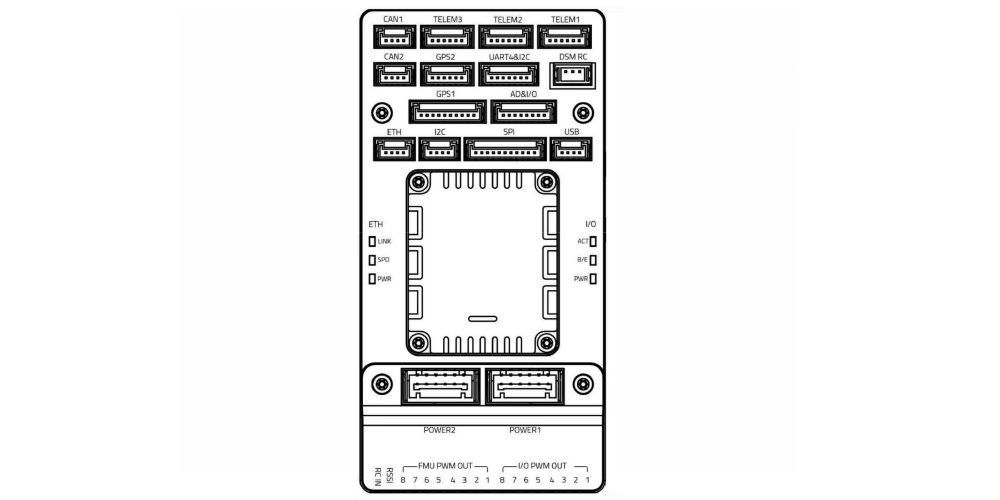 | FC Flight Controller |
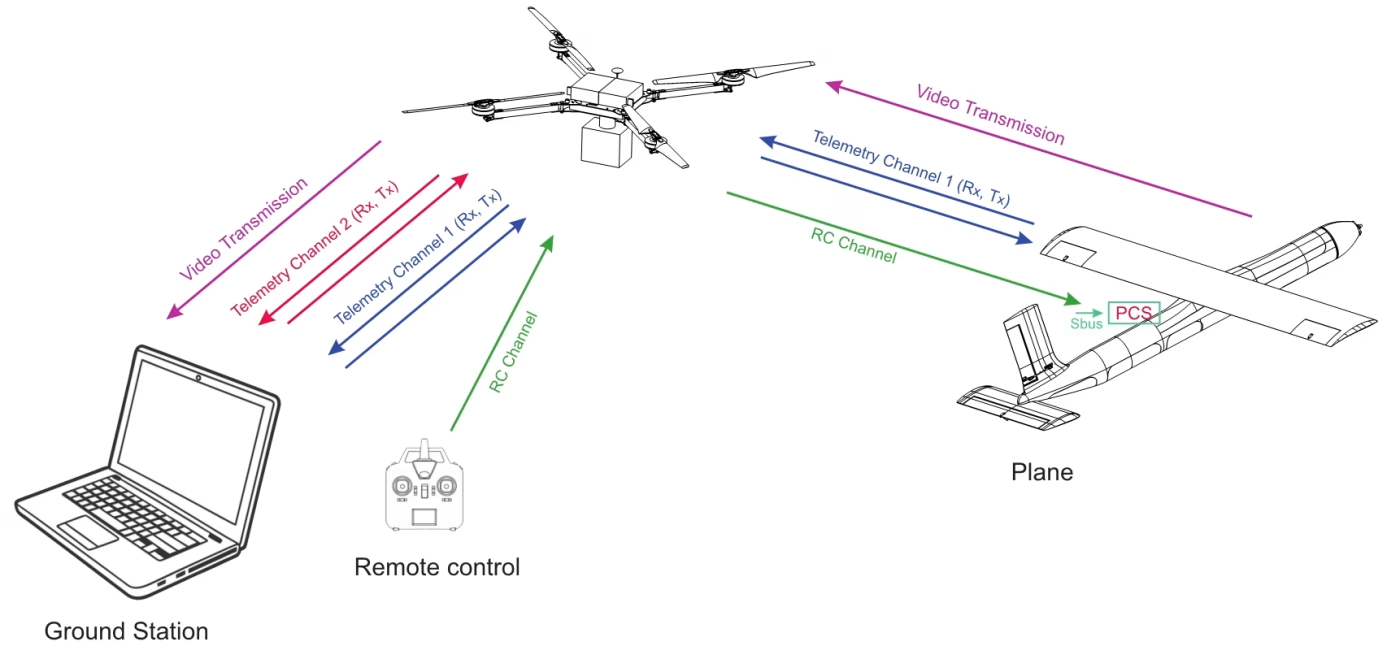
| Telemetry Channel 1 (수신, 송신) | Telemetry Channel between Plain and Ground station (two-sided communication) |
| RC Channel | RC Channel between Remote control and Plain (one-sided communication) |
| Telemetry Channel 2 (수신, 송신) | Telemetry Channel between Ground station and Copter Re-translator (two-sided communication) |
| Video Transmission | Video Channel between Plain and Ground station (one-sided communication) |
This schematic diagram shows the system connections (데이터 및 비디오) that we want to build
Requirements
We have a system consisting of independent components, between which must be communication.
The communication system has two main sections:
data transmission and video transmission.
The main functions which we want to implement
- We need to send data to the aircraft via a retranslator and receive it at a ground station.
- We need to send data to the aircraft via a retranslator by remote control
- We need to receive video from aircraft via a retranslator at a ground station.
- The distance range between the retranslator and the plane should be 50 km (unidirectional video link it’s mean simplex data link)
- We need to send data to the retranslator and receive it at a ground station.
- Data transmission must be safe (hopping frequency)
- 비디오 품질 – HD
- Video Latency 50 밀리초
- Ability to work on 4 independent non-standard channels (회수) for video transmission
- Possibility of changing video transmission channels (회수) during operation
해결책
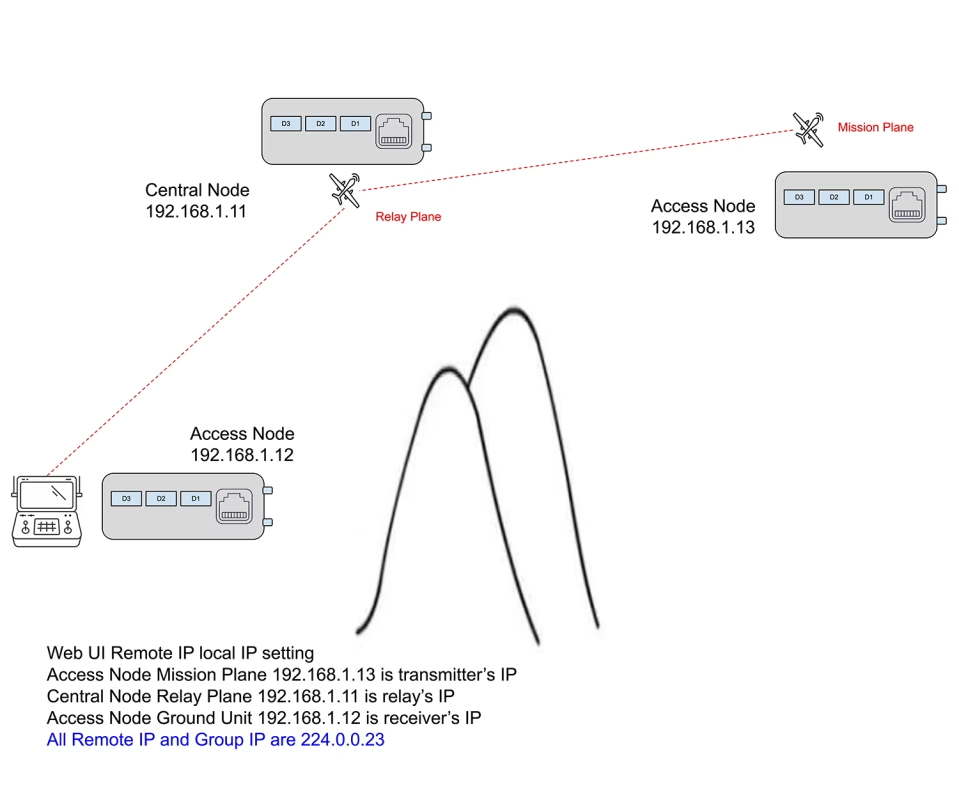
우리는 추천했습니다 TX900-5WPA-50KM 3 단위. One as the Transmitter at the mission plane, one as the ground receiver for ground control station, another one as the relay / 연발총 / re-translator at the relay helicopter.
자주하는 질문
Q1: What is the distance from the middle helicopter to the ground control station, and what is the distance from the mission drone to the middle helicopter?
ㅏ: We can provide solutions for different transmission distances according to the needs of your project.
The above customer requires 1 에 2 kilometers from the ground to the relay helicopter. From the relay to the mission drone, it is 50 킬로미터. This is a typical application. The customer hopes to fly 1 에 2 kilometers above the ground control end. It is used to overcome the obstruction of ground buildings or nearby mountains to achieve control and real-time monitoring of remote drones.
큐: Does it use four separate, non-standard frequencies for video transmission?
ㅏ: We can provide 6 operating frequencies based on 20Mhz bandwidth, such as 1420Mhz, 1440MHz의, 1460MHz의, 1480MHz의, 1500Mhz and 1520Mhz.
큐: Is it possible to change the video transmission frequency while working?
ㅏ: Our wireless video and data relay solutions can automatically select the frequency with the strongest signal based on signal strength. We call this frequency hopping. There is no way to manually switch the frequency in this process. Unless you select a certain frequency range during configuration, rather than the entire frequency range from 1420~1530Mhz.
큐: During video transmission, how can the device identify interference and subsequently adjust its frequency?
Depending on the signal strength, the drone’s transmitter, repeater and receiver automatically select the strongest signal, comparing signal quality across available frequencies.
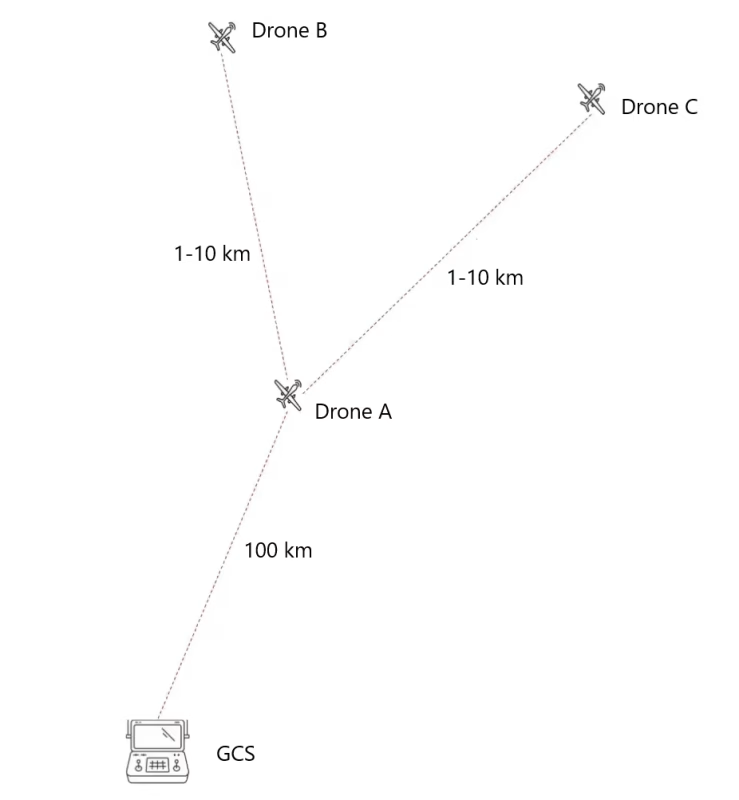
I am looking for a solution for a system like in the above picture. The GCS will be constantly in LOS with the Drone A and the Drone A will be in LOS with the drones B and C.
The delay to control the drones B and C should be as small as possible. What do you estimate of the delay being when controlling drones B and C with different configurations? The cost of the Drone A can be big but the cost of the drones B and C should be as low as possible.
Is it possible to use for example an analog system between drone A and drone B+C? To keep the delay and price as low as possible. How is the analog system’s video then transmitted to GCS via drone A?
Please ask for more information or requirements. If this is enough information, could you please recommend models and options for executing this setup?
질문하기
응답해 주셔서 감사합니다. ✨