 | Літак, БЛА, Дрон |
 | вертоліт |
 | Наземна станція управління |
 | Sbus дистанційного керування |
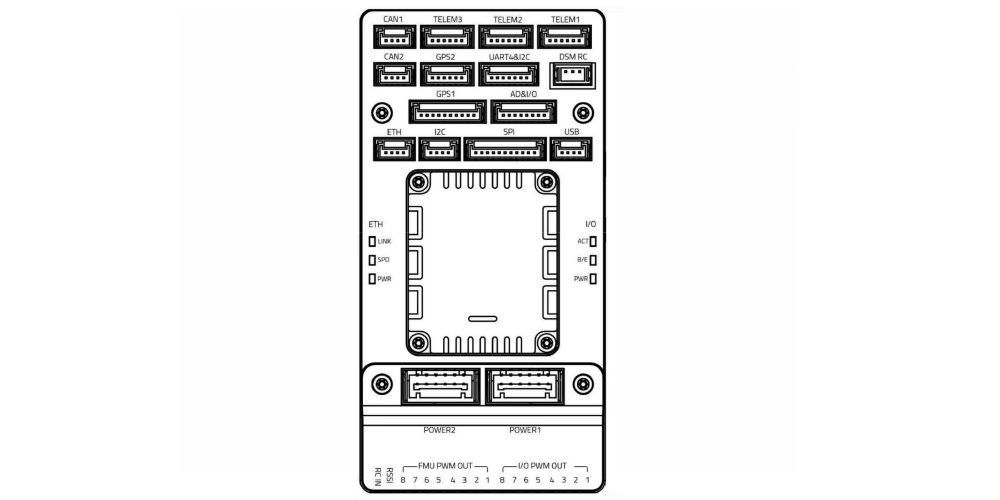 | Контролер польотів FC |
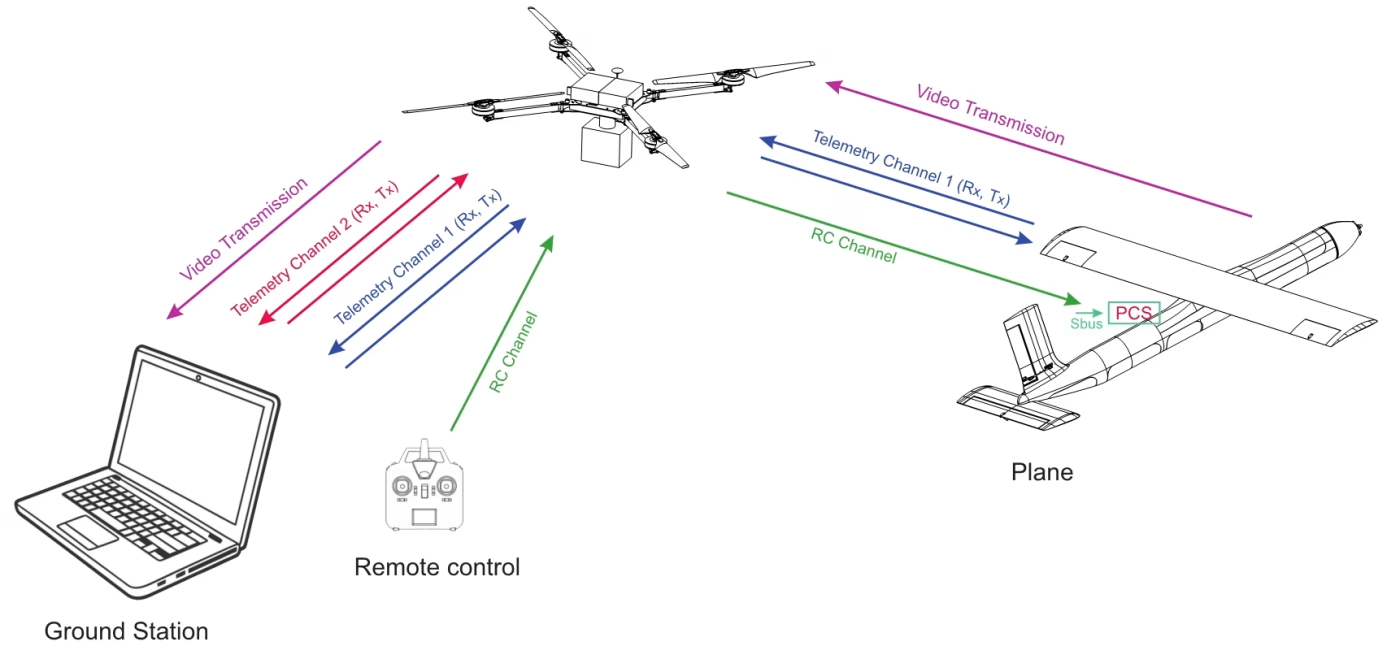
| Телеметричний канал 1 (Rx, Tx) | Телеметричний канал між простою та наземною станціями (двостороннє спілкування) |
| Канал RC | Канал RC між дистанційним керуванням і звичайним (одностороннє спілкування) |
| Телеметричний канал 2 (Rx, Tx) | Телеметричний канал між наземною станцією та ретранслятором коптера (двостороннє спілкування) |
| Передача відео | Відеоканал між простою та наземною станціями (одностороннє спілкування) |
На цій принциповій схемі показано підключення системи (дані та відео) що ми хочемо побудувати
Вимоги
У нас є система, що складається з незалежних компонентів, між якими має бути зв'язок.
Система зв'язку складається з двох основних розділів:
передача даних і передача відео.
Основні функції, які ми хочемо реалізувати
- Нам потрібно передати дані на літак через ретранслятор і отримати їх на наземній станції.
- Нам потрібно передати дані на літак через ретранслятор дистанційним керуванням
- Нам потрібно приймати відео з літака через ретранслятор на наземній станції.
- Діапазон відстані між ретранслятором і літаком має бути 50 км (односпрямований відеозв’язок – це середній симплексний канал передачі даних)
- Нам потрібно відправити дані на ретранслятор і отримати їх на наземній станції.
- Передача даних має бути безпечною (частота стрибків)
- Якість відео – HD
- Затримка відео 50 мілісекунд
- Уміння працювати далі 4 незалежні нестандартні канали (частота) для передачі відео
- Можливість зміни каналів передачі відео (частота) під час експлуатації
рішення
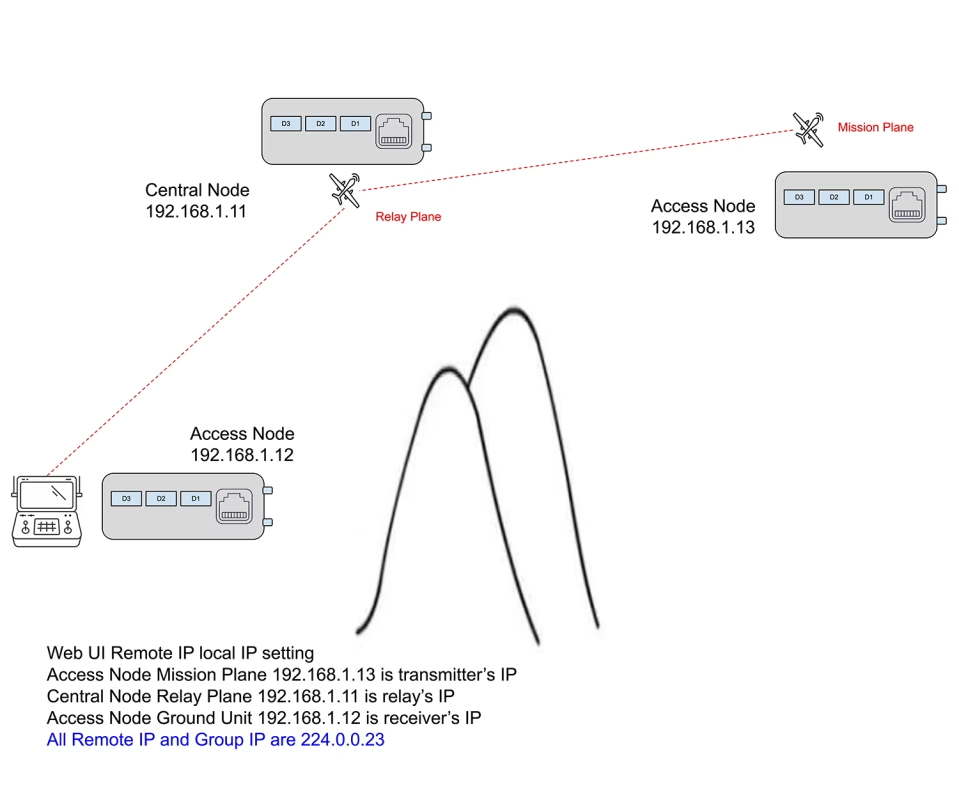
Ми рекомендували TX900-5WPA-50KM 3 одиниць. Один як передавач у літаку місії, один як наземний приймач для наземної станції управління, інший як реле / повторювач / ре-перекладач на естафеті вертольота.
FAQ
Q1: Яка відстань від середнього вертольота до наземної станції управління, і яка відстань від місійного дрона до середнього вертольота?
A: Ми можемо надати рішення для різних відстаней передачі відповідно до потреб вашого проекту.
Вищезазначений клієнт вимагає 1 до 2 кілометрів від землі до естафетного гелікоптера. Від естафети до місійного дрона, це так 50 кілометрів. Це типове застосування. Клієнт сподівається на політ 1 до 2 кілометрів над наземним пунктом управління. Він використовується для подолання перешкод наземних будівель або прилеглих гір для досягнення контролю та моніторингу в реальному часі віддалених дронів.
Q: Чи використовує він чотири окремі, нестандартні частоти для передачі відео?
A: Ми можемо забезпечити 6 робочі частоти базуються на смузі пропускання 20 МГц, наприклад 1420 МГц, 1440МГц, 1460МГц, 1480МГц, 1500МГц і 1520 МГц.
Q: Чи можна змінювати частоту передачі відео під час роботи?
A: Наші рішення для бездротової ретрансляції відео та даних можуть автоматично вибирати частоту з найпотужнішим сигналом на основі потужності сигналу. Ми називаємо це стрибком частоти. У цьому процесі неможливо перемикати частоту вручну. Якщо під час конфігурації ви не вибрали певний діапазон частот, а не весь діапазон частот від 1420~1530 МГц.
Q: Під час передачі відео, як пристрій може визначити перешкоди та згодом налаштувати їх частоту?
Залежно від потужності сигналу, передавач дрона, ретранслятор і приймач автоматично вибирають найсильніший сигнал, порівняння якості сигналу на доступних частотах.
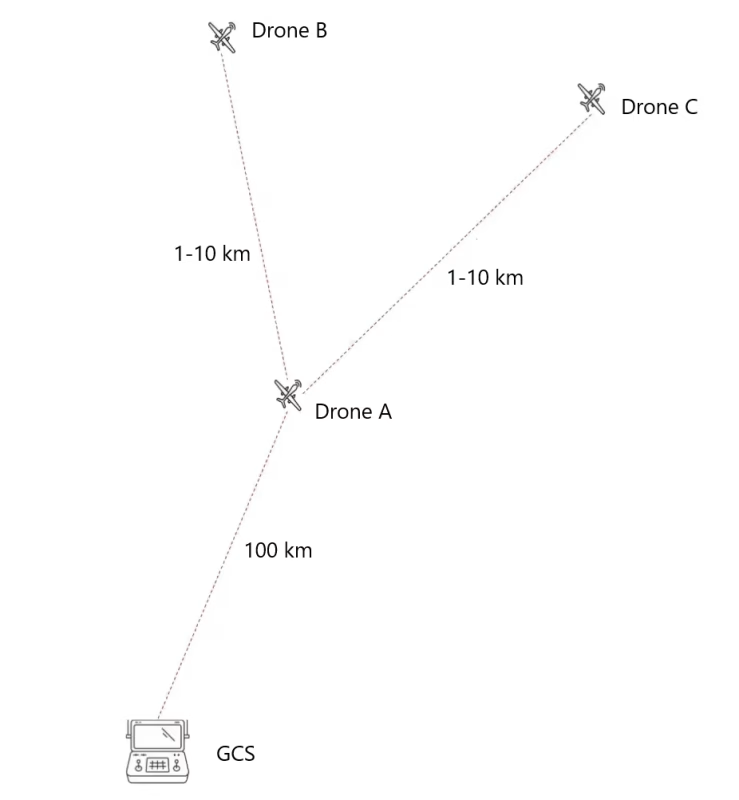
Я шукаю рішення для системи, як на зображенні вище. GCS буде постійно перебувати в LOS з безпілотником A, а дрон A буде в LOS з дронами B і C.
Затримка для керування дронами B і C повинна бути якомога меншою. Як ви оцінюєте затримку під час керування дронами B і C з різними конфігураціями? Вартість дрона A може бути великою, але вартість дронів B і C повинна бути якомога нижчою.
Чи можна використовувати, наприклад, аналогову систему між дроном A та дроном B+C? Щоб затримка та ціна були якомога нижчими. Як відео аналогової системи потім передається на GCS через дрон A?
Будь ласка, запитайте більше інформації або вимог. Якщо цього достатньо інформації, не могли б ви порекомендувати моделі та параметри для виконання цього налаштування?
Задавати питання
Дякуємо за вашу відповідь. ✨