Systemet omfatter seksten luftbårne Datalink Air Units (en pr fugl), en enkelt Datalink Ground Unit, og en jordkontrolstation (GCS). Formålet er at specificere grænseflader, kabellængder, havn tæller, og accepttests, så enheder leveret af leverandører vil fungere sammen med den eksisterende FCC (flyvekontrol computer), kameraer (søgende), og GCS.
Der kræves en komplet løsning for at etablere en dataforbindelse mellem en jordstation og 4 UAV luftenheder. Systemet skal muliggøre pålidelig kommunikation, kontrollere, og overvågning af alle UAV'er samtidigt. Detaljerede tekniske krav er angivet nedenfor.
Oversigt:
∙ Konfiguration: 1 × Jordkontrolenhed (GCU) kommunikere med 4 × Luftenheder (Ud af) ∙ Kommunikationstype: Punkt-til-multipunkt tovejslink (Ethernet + UART) ∙ Rækkevidde: ≥ 80 km sigtelinje (DET)
∙ Driftsbånd: 1.4GHz(L-Band)
∙ Modulationsordning: TDD-OFDM / QPSK / 16-QAM
∙ Strømbehov: driftsspænding (12V), Nuværende tærskel (≤2A) ∙ Temperaturområde: -20°C til 75 °C
Datagennemstrømning og båndbredde:
| Parameter | Krav | Noter |
| Videodatahastighed (pr. ansøger) | 5 – 9 Mbps | 1080p @ 30 fps H.264/265 komprimering |
| Telemetri + Kontrollere (per FCC) | 200 – 300 kbps | UART-baserede tovejs kontroldata |
| Samlet videogennemstrømning (4 Ud af) | 24 – 36 Mbps | Kombineret video uplink |
| Samlet telemetri/kontrol | 1 Mbps | Ubetydelig sammenlignet med video |
| Samlet påkrævet Uplink-båndbredde | ≥ 36 Mbps | Med 20% FEC + overhead ≈ 42 Mbps |
Latens og kvalitetskrav:
| Parameter | Krav | Noter |
| Bitfejlfrekvens | < 8×10-8 | Ved max rækkevidde |
| Dataforsinkelse | < 1Frk | Nødvendig til real-time søgeoperation og datatransmission |
| Pakketab | < 1% | Med FEC + ARQ mekanismer |
| Fejlrettelse | FEC + CRC + ARQ | Obligatorisk for telemetripålidelighed |
Link budget & RF-parametre:
| Parameter | Målværdi | Noter |
| Transmittere strøm (Luftenhed) | 4 – 5 W | – |
| Transmittere strøm (Jordenhed) | 4 – 5 W | – |
| Antenneforstærkning (Luftenhed) | >3dB | Antenne mønster: Isotropisk |
| Antenneforstærkning (Jordenhed) | 12 – 18 dB | Retningsbestemt antenne |
| Modtagerfølsomhed | –103dBm @ 10 MHz | For 10⁻⁵ BER |
| Link margin @ 80 km | > 10 dB | Sikrer robust video + datalink |
NOTE:
⮚ Til problemfri integration mellem CUAV V5+ flyvekontrolleren og eksterne enheder, det er vigtigt, at UART-væven opretholder en direkte og ukompliceret ledningsstruktur. Helt konkret, væven fra UART-porten skal være udformet som en enkelt lige linjeforbindelse uden at indføre yderligere omformere eller mellemkort. Dette minimerer potentielle fejlpunkter, reducerer latens, og sikrer en let og pålidelig ledningsarkitektur.
⮚ Ydermere, væven skal fungere ved Transistor-Transistor Logic (TTL) spændingsniveauer, da V5+ flyvelederen kommunikerer via TTL UART. Enhver afvigelse fra TTL (såsom RS-232 eller RS-485 niveauer) ville nødvendiggøre eksterne niveauskiftere eller omformere, hvilket er i modstrid med kravet om en direkte væv. Ved at overholde TTL-standarder, signalkompatibilitet bibeholdes, sikre:
o Direkte kommunikation mellem V5+ og tilsluttede moduler.
o Reduceret hardwarekompleksitet ved at eliminere konvertere eller oversættere. o Lavere vægt og forbedret pålidelighed, da færre komponenter er involveret i signalvejen.
o Forbedret signalintegritet, da yderligere konverteringstrin kan introducere støj eller timing uoverensstemmelser.
Som konklusion, vævekonstruktionen bør strengt taget give et lige-gennem UART-ledningsnet, der fungerer ved TTL-spændinger, tilpasser sig CUAV V5+ elektriske specifikationer og garanterer optimal ydeevne i luftbårne applikationer.
Systemoversigt:
Systembeskrivelse på højt niveau:
1. Fire UAV'er, hver udstyret med:
o 1 × Datalink Air Unit
o 1 × FCC (Flight Control Computer, F.eks., FALSK V5+)
o 1 × Søger / Kamera
2. 1 × Datalink Ground Unit forbundet med Ground Control Station (GCS).
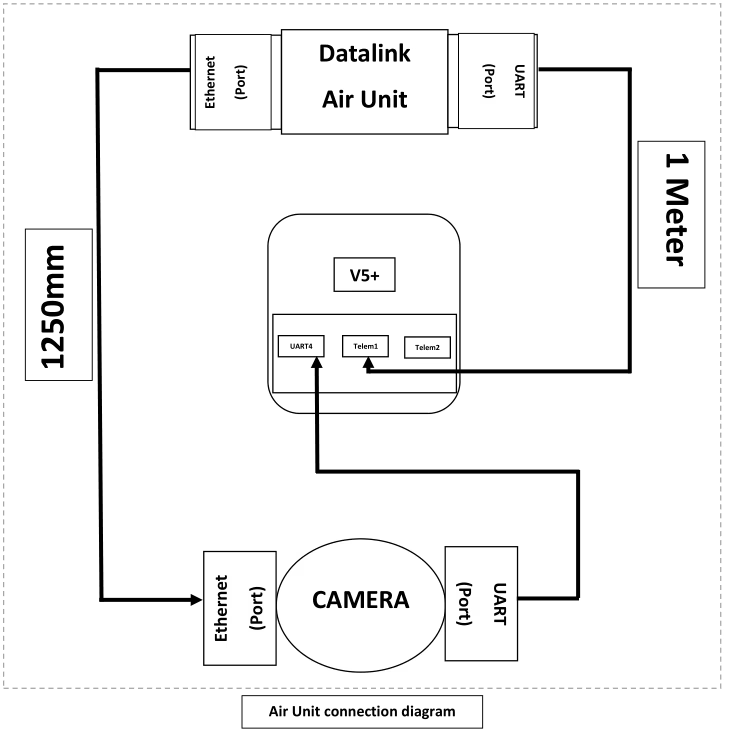
Dataflow (oversigt): Video- og sensordata fra hvert kamera leveres til dets tilhørende Datalink Air Unit via kameraets Ethernet-port. Telemetri- og kontroldata mellem FCC og luftenheden overføres via et UART-link. Datalink Air Unit transmitterer disse strømme over datalinket til Ground Unit; Ground Unit demultiplekser strømmene og præsenterer dem for GCS som en enkelt Ethernet-strøm (kamera video og data) og en enkelt serie (UART/USB) telemetristrøm.
Krav til luftenhed:
Hver Datalink Air Unit (en per UAV) skal opfylde følgende obligatoriske krav:
1. Grænseflader & Havne (minimum):
o 1 × UART-port (minimum). Denne port skal bruges til telemetri-/kontrolforbindelse til FCC (telemetriporte Telem1 / Telem2 på FCC).
o 1 × Ethernet-port (minimum). Denne port skal bruges til at modtage kamera/søgende Ethernet-data.
2. Kabeltilslutning (leveres med Air Unit):
o 1 × UART kabel (primær) — længde: 1.0 m (± 5%). Kablet skal bære TX, RX, GND og VCC. Kablet skal termineres, så det passer til Datalink UART-stikket i den ene ende og FCC-telemetristikket i den anden.
o 1 × Ethernet-kabel (primær) — længde: 1.0 m (± 5%). Kablet skal være standard skærmet Cat5e eller Cat6 patch kabel med RJ45 stik.
o 2 × reservesæt (pr luftenhed) - dvs., to ekstra UART-kabler og to ekstra Ethernet-kabler skal leveres med hver Air Unit (samlet leveret pr. enhed = 3 UART-kabler, 3 Ethernet kabler).
3. Mekanisk & Fysisk:
o Kabler skal være farvekodede (anbefales) og har tydelige retningsmarkeringer, hvis pinouts ikke er symmetriske.
4. Elektrisk/protokol:
o UART: Understøtter almindelige baudrater op til mindst 921600 bps. Angiv brugerkonfigurerbare UART-parametre.
o Ethernet: Støt i hvert fald 100 Mbps drift (Gigabit foretrækkes). Understøtter almindelige transportprotokoller (UDP, RTSP til video og UDP til kontrol) — specifik protokolvalg skal kunne konfigureres.
Krav til jordenhed:
Jordenheden udfører demultiplexing af data fra alle fire luftenheder og præsenterer en samlet grænseflade til GCS. Obligatoriske krav er:
1. Grænseflader & Havne (minimum):
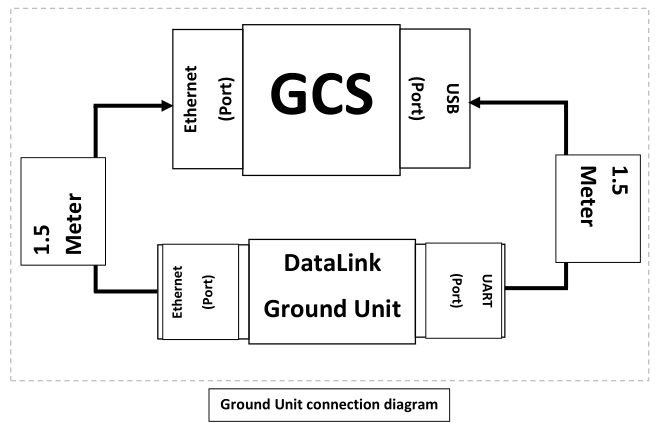
o 1 × UART-port (præsenteret for GCS). Jordenheden skal samle telemetristrømme fra alle fire luftenheder og præsentere dem for GCS som en enkelt UART/USB-grænseflade (F.eks., Ground Unit UART tilsluttet et USB-interface på GCS).
o 1 × Ethernet-port (præsenteret for GCS). Jordenheden skal samle kamera-/video- og datastrømme fra de fire luftenheder og præsentere dem som en enkelt Ethernet-grænseflade til GCS.
2. Aggregationsadfærd:
o Jordenheden skal acceptere fire uafhængige indgående datastrømme (en fra hver luftenhed) og demultipleks dem til en kombineret Ethernet-stream og en kombineret seriel stream. Fra GCS’ perspektiv skal der kun være et Ethernet-link og et UART-link til at konfigurere og overvåge.
o Aggregation skal bevare kildeadressering, så GCS kan identificere, hvilken strøm der er fra hvilken fugl. Jordenheden må ikke miste identifikationsoplysninger pr. fugl.
3. Kabeltilslutning (leveres med Ground Unit):
o 1 × UART kabel (primær) — længde: 400 mm (0.4 m). Kablet skal tillade forbindelse fra Ground Unit UART-porten til GCS USB-porten (hvis Ground Unit UART er en direkte UART, giv et USB-UART-adapterkabel). Kablet skal bære TX, RX, GND og VCC.
o 1 × Ethernet-kabel (primær) — længde: 400 mm (0.4 m). Kablet skal være skærmet Cat5e/Cat6 patch-kabel med RJ45-stik.
o 2 × reservesæt — to ekstra UART- og to ekstra Ethernet-kabler, der leveres som reservedele med jordenheden.
4. Elektrisk/protokol:
o Aggregation skal være gennemsigtig med hensyn til Ethernet-rammer til video; hvor det er nødvendigt, kan jordenheden ompakke strømme til en enkelt transportstrøm, men skal bevare tidsinformation og kildeidentifikation pr. fugl.
o Telemetri multipleksing: Jordenheden skal tidsmultiplekse eller pakke telemetristrømme til en enkelt UART-strøm med tydelig ramme og valgfri tags for at skelne meddelelser efter fugle-id. Den protokol, der bruges til multipleksing, skal være dokumenteret og understøttet af GCS-softwaren.
Forbindelse & Kabelspecifikationer
Dette afsnit viser de anbefalede kabel- og stikspecifikationer for at sikre pålidelig ydeevne i luftbårne og jordmiljøer.
1. Ethernet kabler (Luftenhed -> Kamera og jordenhed -> GCS): Standard skærmede Cat5e eller Cat6 patch kabler med RJ45 termineringer. Brug fuldt afskærmet (STP) kabel, hvis installationen har høj EMI.
2. Ethernet længde (Luftenhed): 1.0 m ±5 %.
3. Ethernet længde (Jordenhed): 400 mm ±5 %.
4. UART kabler (Luftenhed -> FCC telemetri): 4-leder kabel (TX, RX, GND, valgfri RTS/CTS). Længde: 1.0 m ±5 %.
5. UART kabel (Jordenhed -> GCS USB/UART): 400 mm ±5 % (inkludere USB-UART-adapter, hvis det kræves af GCS).
6. Kabelafskærmning og jording: Sørg for fælles jord og sørg for, at afskærmningen afsluttes i den ene ende i henhold til bedste praksis for at undgå jordsløjfer. Brug låsende RJ45 eller låsestik, hvis der forventes vibrationer.
7. Lever adapterkabler til at forbinde Datalink UART til CUAV V5+ telemetristik (hvis Datalink-enheden ikke naturligt eksponerer et kompatibelt stik).
8. Hvor kameraet understøtter Power-over-Ethernet (PoE) men Datalink Air Unit leverer ikke PoE, give en PoE-injektor.
Funktionel & Protokolkrav
Vigtige funktionelle krav og anbefalinger:
1. Identifikation pr. fugl: Hver datastrøm (Video eller telemetri) SKAL mærkes med et unikt fugle-id, så GCS kan kortlægge streams til køretøjer.
2. Multiplexing-skema: Jordenheden skal implementere en deterministisk multipleksingsplan for telemetri (UART) giver GCS mulighed for at parse og dirigere beskeder ved hjælp af Bird ID. 3. Latency og Gennemløb: Systemet skal minimere yderligere aggregeringsforsinkelse. 4. Pålidelighed: Jordenheden skal håndtere midlertidigt tab af en eller flere luftenheder med ynde og fortsætte med at præsentere resterende strømme til GCS.
5. Konfigurationsgrænseflade: Angiv en konfigurationsmetode (et detaljeret dokument) for at indstille fugle-id'er, UART baudrater, og per-stream-prioriteter.
Stil et spørgsmål
Din besked er sendt