Le système comprend seize unités aériennes Datalink aéroportées (un par oiseau), une seule unité au sol Datalink, et une station de contrôle au sol (GC). Le but est de spécifier les interfaces, longueurs de câble, nombre de ports, et des tests d'acceptation afin que les unités livrées par les fournisseurs interagissent avec le FCC existant (ordinateur de contrôle de vol), caméras (chercheurs), et le GCS.
Une solution complète est nécessaire pour établir une liaison de données entre un station au sol et 4 Unités aériennes de drones. Le système doit permettre une communication fiable, contrôle, et surveillance de tous les drones simultanément. Les exigences techniques détaillées sont fournies ci-dessous.
Aperçu:
∙ Configuration: 1 × Unité de contrôle au sol (CGU) communiquer avec 4 × Unités aériennes (De) ∙ Type de communication: Liaison bidirectionnelle point à multipoint (le port série paramétrable + UART) ∙ Intervalle: ?? 80 km de visibilité directe (LDV)
∙ Bande de fonctionnement: 1.4GHz(Bande en L)
∙ Schéma de modulation: TDD-OFDM / QPSK / 16-QAM
∙ Exigence de puissance: tension de fonctionnement (12V), Seuil actuel (≤2A) ∙ Écart de température: -20°C à 75°C
Débit de données et bande passante:
| Paramètre | Exigence | Remarques |
| Débit de données vidéo (par chercheur) | 5 - 9 mbps | 1080p@ 30 compression H.264/265 fps |
| Télémétrie + Contrôle (par FCC) | 200 - 300 kbps | Données de contrôle bidirectionnel basées sur UART |
| Débit vidéo global (4 De) | 24 - 36 mbps | Liaison montante vidéo combinée |
| Télémétrie/Contrôle agrégé | 1 mbps | Négligeable par rapport à la vidéo |
| Bande passante totale requise pour la liaison montante | ?? 36 mbps | Avec 20% FEC + frais généraux ≈ 42 mbps |
Exigences de latence et de qualité:
| Paramètre | Exigence | Remarques |
| Taux d'erreur sur les bits | < 8×10-8 | À portée maximale |
| Retard de données | < 1Mme | Nécessaire pour le fonctionnement du chercheur en temps réel et la transmission de données |
| Perte de paquets | < 1% | Avec FEC + Mécanismes ARQ |
| Correction d'erreur | FEC + CRC + ARQ | Obligatoire pour la fiabilité de la télémétrie |
Budget des liens & Paramètres RF:
| Paramètre | Valeur cible | Remarques |
| Transmettre la puissance (Unité aérienne) | 4 – 5 W | – |
| Transmettre la puissance (Unité au sol) | 4 – 5 W | – |
| Gain d'antenne (Unité aérienne) | >3dB | Modèle d'antenne: Isotrope |
| Gain d'antenne (Unité au sol) | 12 - 18 dB | Antenne directionnelle |
| Sensibilité au récepteur | –103 dBm à 10 MHz | Pour 10⁻⁵ BER |
| Marge du lien @ 80 km | > 10 dB | Garantit une vidéo robuste + liaison de données |
NOTE:
⮚ Pour une intégration transparente entre le contrôleur de vol CUAV V5+ et les périphériques externes, il est essentiel que le métier à tisser UART maintienne un structure de câblage directe et simple. Spécifiquement, le métier à tisser du port UART doit être conçu comme un connexion en ligne droite unique sans introduire de convertisseurs ou de cartes intermédiaires supplémentaires. Cela minimise les points de défaillance potentiels, réduit la latence, et garantit une architecture de câblage légère et fiable.
⮚ En outre, le métier à tisser doit fonctionner selon la logique transistor-transistor (TTL) niveaux de tension, car le contrôleur de vol V5+ communique via TTL UART. Tout écart par rapport au TTL (tels que les niveaux RS-232 ou RS-485) nécessiterait des décaleurs ou des convertisseurs de niveau externes, ce qui contredit l'exigence d'un métier à tisser direct. En adhérant aux normes TTL, la compatibilité du signal est maintenue, assurer:
o Communication directe entre le V5+ et les modules connectés.
o Réduction de la complexité matérielle en éliminant les convertisseurs ou traducteurs. o Poids réduit et fiabilité améliorée, car moins de composants sont impliqués dans le chemin du signal.
o Amélioration de l'intégrité du signal, puisque des étapes de conversion supplémentaires peuvent introduire du bruit ou des décalages de synchronisation.
En conclusion, la conception du métier à tisser doit strictement fournir un faisceau de câbles UART direct fonctionnant à des tensions TTL, s'alignant sur les spécifications électriques du CUAV V5+ et garantissant des performances optimales dans les applications aéroportées.
Présentation du système:
Description du système de haut niveau:
1. Quatre drones, chacun équipé de:
o 1 × Unité aérienne Datalink
o 1 × FCC (Ordinateur de contrôle de vol, Par exemple, FAUX V5+)
o 1 × Chercheur / Caméra
2. 1 × Unité au sol Datalink connectée à la station de contrôle au sol (GC).
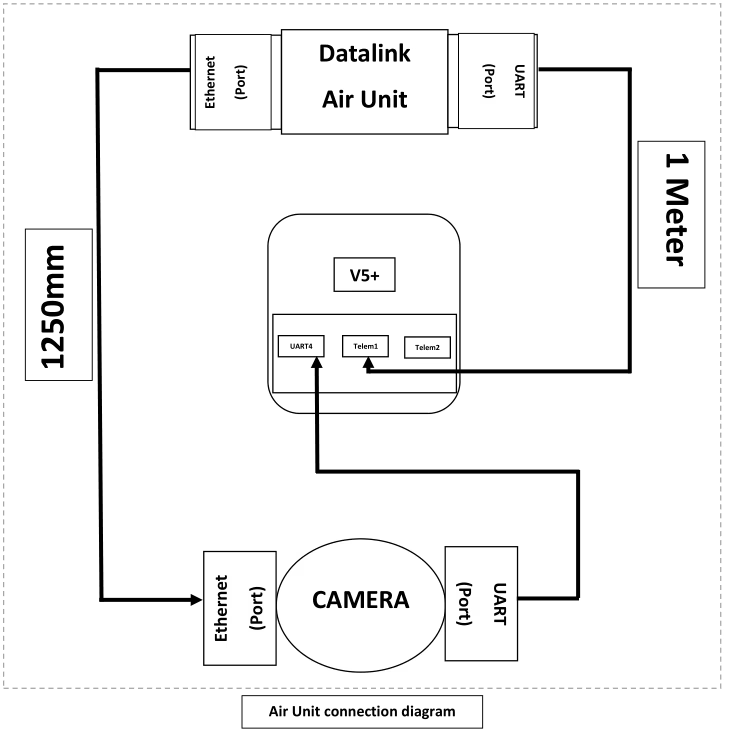
Flux de données (aperçu): Les données vidéo et de capteur de chaque caméra sont fournies à son unité aérienne Datalink associée via le port Ethernet de la caméra.. Les données de télémétrie et de contrôle entre le FCC et l'unité aérienne sont transportées via une liaison UART. L'unité aérienne Datalink transmet ces flux via la liaison de données à l'unité au sol.; l'unité au sol démultiplexe les flux et les présente au GCS comme un seul flux Ethernet (vidéo et données de la caméra) et une seule série (UART/USB) flux de télémétrie.
Exigences relatives aux unités aériennes:
Chaque unité aérienne Datalink (un par drone) doit répondre aux exigences obligatoires suivantes:
1. Interfaces & Ports (minimum):
o 1 ×Port UART (minimum). Ce port doit être utilisé pour la connectivité de télémétrie/contrôle au FCC (ports de télémétrie Telem1 / Telem2 sur le FCC).
o 1 ×Port Ethernet (minimum). Ce port doit être utilisé pour recevoir les données Ethernet de la caméra/chercheur.
2. Connectivité par câble (livré avec l'unité aérienne):
o 1 × câble UART (primaire) - longueur: 1.0 m (± 5%). Le câble doit transporter TX, RX, GND et VCC. Le câble doit être terminé pour correspondre au connecteur Datalink UART à une extrémité et au connecteur de télémétrie FCC à l'autre.
o 1 × Câble Ethernet (primaire) - longueur: 1.0 m (± 5%). Le câble doit être un câble de raccordement blindé standard Cat5e ou Cat6 avec des connecteurs RJ45.
o 2 × jeux de rechange (par unité aérienne) - c'est-à-dire, deux câbles UART supplémentaires et deux câbles Ethernet supplémentaires doivent être fournis avec chaque unité aérienne (total fourni par unité = 3 câbles UART, 3 Câbles Ethernet).
3. Mécanique & Physique:
o Les câbles doivent être codés par couleur (recommandé) et avoir des marquages de direction clairs si les brochages ne sont pas symétriques.
4. Électrique/Protocole:
o UART: Prend en charge les débits en bauds courants jusqu'à au moins 921600 bps. Fournir des paramètres UART configurables par l'utilisateur.
o le port série paramétrable: Soutenir au moins 100 Fonctionnement Mbit/s (Gigabit préféré). Prise en charge des protocoles de transport courants (UDP, RTSP pour la vidéo et UDP pour le contrôle) — la sélection de protocoles spécifiques doit être configurable.
Exigences relatives aux unités au sol:
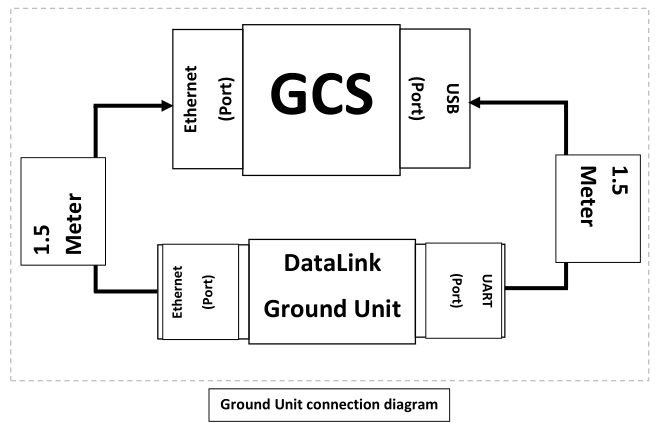
L'unité terrestre effectue le démultiplexage des données des quatre unités aériennes et présente une interface unifiée avec le GCS.. Les exigences obligatoires sont:
1. Interfaces & Ports (minimum):
o 1 ×Port UART (présenté au GCS). L'unité au sol doit regrouper les flux de télémétrie des quatre unités aériennes et les présenter au GCS sous la forme d'une seule interface UART/USB. (Par exemple, l'unité au sol UART connectée à une interface USB sur le GCS).
o 1 ×Port Ethernet (présenté au GCS). L'unité au sol doit regrouper les flux de caméras/vidéo et de données des quatre unités aériennes et les présenter comme une interface Ethernet unique au GCS.
2. Comportement d'agrégation:
o L'unité au sol doit accepter quatre flux de données entrants indépendants (un de chaque unité aérienne) et démultiplexez-les en un flux Ethernet combiné et un flux série combiné. Du GCS’ Dans une perspective, il ne doit y avoir qu'une seule liaison Ethernet et une seule liaison UART à configurer et à surveiller.
o L'agrégation doit préserver l'adressage source, afin que le GCS puisse identifier quel flux provient de quel oiseau. L'unité au sol ne doit pas perdre les informations d'identification par oiseau.
3. Connectivité par câble (livré avec l'Unité Sol):
o 1 × câble UART (primaire) - longueur: 400 mm (0.4 m). Le câble doit permettre la connexion du port UART de l'unité au sol au port USB du GCS. (si l'UART de l'unité au sol est un UART direct, fournir un câble adaptateur USB-UART). Le câble doit transporter TX, RX, GND et VCC.
o 1 × Câble Ethernet (primaire) - longueur: 400 mm (0.4 m). Le câble doit être un câble de raccordement blindé Cat5e/Cat6 avec des connecteurs RJ45.
o 2 × jeux de rechange — deux câbles UART supplémentaires et deux câbles Ethernet supplémentaires fournis en pièces de rechange avec l'unité au sol.
4. Électrique/Protocole:
o L'agrégation doit être transparente par rapport aux trames Ethernet pour la vidéo; si nécessaire, l'unité au sol peut reconditionner les flux en un seul flux de transport, mais doit conserver les informations temporelles et l'identification de la source par oiseau.
o Multiplexage de télémétrie: L'unité au sol doit multiplexer dans le temps ou mettre en paquets les flux de télémétrie en un seul flux UART avec un cadrage clair et des balises facultatives pour distinguer les messages par ID d'oiseau.. Le protocole utilisé pour le multiplexage doit être documenté et pris en charge par le logiciel GCS.
Connectivité & Spécifications du câble
Cette section répertorie les spécifications recommandées des câbles et des connecteurs pour garantir des performances fiables dans les environnements aéroportés et au sol.
1. Câbles Ethernet (Unité aérienne -> Caméra et unité au sol -> GC): Câbles de brassage blindés standard Cat5e ou Cat6 avec terminaisons RJ45. Utilisation entièrement blindée (STP) câble si l'installation a des EMI élevées.
2. Longueur Ethernet (Unité aérienne): 1.0 m ± 5%.
3. Longueur Ethernet (Unité au sol): 400 mm ±5%.
4. Câbles UART (Unité aérienne -> Télémétrie FCC): 4-câble conducteur (TX, RX, GND, RTS/CTS en option). Longueur: 1.0 m ± 5%.
5. Câble UART (Unité au sol -> GCSUSB/UART): 400 mm ±5% (inclure un adaptateur USB-UART si requis par le GCS).
6. Blindage et mise à la terre des câbles: Fournir une terre commune et garantir que le blindage se termine à une extrémité conformément aux meilleures pratiques pour éviter les boucles de terre.. Utilisez des connecteurs RJ45 verrouillables ou à verrouillage si des vibrations sont attendues.
7. Fournir des câbles adaptateurs pour interfacer Datalink UART aux connecteurs de télémétrie CUAV V5+ (si l'unité Datalink n'expose pas nativement un connecteur compatible).
8. Où la caméra prend en charge Power-over-Ethernet (Poe) mais l'unité aérienne Datalink ne fournit pas de PoE, prévoir un injecteur PoE.
Fonctionnel & Exigences du protocole
Exigences fonctionnelles clés et recommandations:
1. Identification par oiseau: Chaque flux de données (vidéo ou télémétrie) DOIT être étiqueté avec un identifiant d'oiseau unique afin que le GCS puisse mapper les flux aux véhicules.
2. Schéma de multiplexage: L'unité au sol doit mettre en œuvre un schéma de multiplexage déterministe pour la télémétrie (UART) permettant à GCS d'analyser et d'acheminer les messages par Bird ID. 3. Latence et débit: Le système doit minimiser la latence d’agrégation supplémentaire. 4. Fiabilité: L'unité terrestre doit gérer la perte temporaire d'une ou plusieurs unités aériennes avec élégance et continuer à présenter les flux restants au GCS.
5. Interface de configuration: Fournir une méthode de configuration (un document détaillé) pour définir les identifiants des oiseaux, Débits en bauds UART, et priorités par flux.
Poser une question
Merci pour votre réponse. ✨