המערכת כוללת שש עשרה יחידות אוויר מוטסות של Datalink (אחד לכל ציפור), יחידת Datalink Ground יחידה, ותחנת בקרת קרקע (GCS). המטרה היא לציין ממשקים, אורכי כבלים, ספירת נמלים, ומבחני קבלה כך שהיחידות המסופקות על ידי ספקים יפעלו הדדית עם ה-FCC הקיים (מחשב בקרת טיסה), מצלמות (המחפשים), וה-GCS.
נדרש פתרון מלא ליצירת קישור נתונים בין א תחנת קרקע ו 4 יחידות אוויר של מל"ט. המערכת אמורה לאפשר תקשורת אמינה, לִשְׁלוֹט, וניטור של כל המל"טים בו זמנית. דרישות טכניות מפורטות מסופקות להלן.
סקירה כללית:
∙ תְצוּרָה: 1 × יחידת בקרת קרקע (GCU) מתקשר עם 4 × יחידות אוויר (מִתוֹך) ∙ סוג תקשורת: קישור דו-כיווני מנקודה למרובת נקודות (אתרנט + UART) ∙ טווח: ≥ 80 ק"מ קו ראייה (LOS)
∙ להקת הפעלה: 1.4GHz(L-Band)
∙ תכנית אפנון: TDD-OFDM / QPSK / 16-QAM
∙ דרישת חשמל: מתח הפעלה (12ו), סף נוכחי (≤2A) ∙ טווח טמפרטורה: -20מעלות צלזיוס עד 75 מעלות צלזיוס
תפוקת נתונים ורוחב פס:
| פָּרָמֶטֶר | דְרִישָׁה | הערות |
| קצב נתוני וידאו (לכל מחפש) | 5 - 9 Mbps | 1080p @ 30 דחיסה של fps H.264/265 |
| טלמטריה + לִשְׁלוֹט (לפי FCC) | 200 - 300 kbps | נתוני בקרה דו-כיווני מבוססי UART |
| תפוקת וידאו מצטברת (4 מִתוֹך) | 24 - 36 Mbps | קישור וידאו משולב |
| טלמטריה/בקרה מצטברת | 1 Mbps | זניח בהשוואה לווידאו |
| רוחב פס כולל נדרש Uplink | ≥ 36 Mbps | עִם 20% FEC + תקורה ≈ 42 Mbps |
חביון ואיכות דרישות:
| פָּרָמֶטֶר | דְרִישָׁה | הערות |
| שיעור שגיאות ביט | < 8×10-8 | בטווח המקסימלי |
| עיכוב נתונים | < 1גברת | נדרש לתפעול מחפש בזמן אמת והעברת נתונים |
| אובדן מנות | < 1% | עם FEC + מנגנוני ARQ |
| תיקון שגיאה | FEC + CRC + ARQ | חובה לאמינות טלמטריה |
קישור תקציב & פרמטרים של RF:
| פָּרָמֶטֶר | ערך יעד | הערות |
| שידור כוח (יחידת אוויר) | 4 – 5 W | – |
| שידור כוח (יחידת קרקע) | 4 – 5 W | – |
| רווח אנטנה (יחידת אוויר) | >3dB | תבנית אנטנה: איזוטרופי |
| רווח אנטנה (יחידת קרקע) | 12 - 18 dB | אנטנה כיוונית |
| רגישות מקלט | –103dBm @ 10 מגה-הרץ | עבור 10⁻⁵ BER |
| קישור מרווח @ 80 ק"מ | > 10 dB | מבטיח וידאו חזק + קישור נתונים |
פֶּתֶק:
⮚ לאינטגרציה חלקה בין בקר הטיסה CUAV V5+ וציוד היקפי חיצוני, חיוני שנול UART ישמור על א מבנה חיווט ישיר ולא מסובך. באופן ספציפי, הנול מיציאת UART צריך להיות מעוצב כ חיבור קו ישר יחיד ללא הכנסת ממירים נוספים או לוחות מתווכים. זה ממזער את נקודות הכשל הפוטנציאליות, מפחית חביון, ומבטיח ארכיטקטורת חיווט קלה ואמינה.
⮚ יתר על כן, הנול חייב לפעול ב-Transistor-Transistor Logic (TTL) רמות מתח, כאשר בקר הטיסה V5+ מתקשר באמצעות TTL UART. כל סטייה מ-TTL (כגון רמות RS-232 או RS-485) יחייב מעבירי רמה חיצוניים או ממירים, מה שסותר את הדרישה של נול ישיר. על ידי עמידה בתקני TTL, תאימות האות נשמרת, מבטיח:
o תקשורת ישירה בין ה-V5+ לבין המודולים המחוברים.
o צמצום מורכבות החומרה על ידי ביטול ממירים או מתרגמים. o משקל נמוך יותר ואמינות משופרת, מכיוון שפחות רכיבים מעורבים בנתיב האות.
o שיפור שלמות האות, שכן שלבי המרה נוספים יכולים להכניס רעש או אי התאמה בתזמון.
לסיכום, עיצוב הנול צריך לספק באופן ישיר רתמת חיווט UART הפועלת במתחי TTL, התאמה למפרטי החשמל CUAV V5+ והבטחת ביצועים מיטביים ביישומים מוטסים.
סקירת מערכת:
תיאור מערכת ברמה גבוהה:
1. ארבעה מל"טים, כל אחד מצויד ב:
o 1 × Datalink Air Unit
o 1 × FCC (מחשב בקרת טיסה, לְמָשָׁל., FALSE V5+)
o 1 × מחפש / מַצלֵמָה
2. 1 × יחידת הקרקע של Datalink מחוברת לתחנת בקרת הקרקע (GCS).
זרימת נתונים (סקירה כללית): נתוני וידאו וחיישנים מכל מצלמה מסופקים ליחידת ה-Datalink Air המשויכת לה דרך יציאת ה-Ethernet של המצלמה. נתוני טלמטריה ובקרה בין ה-FCC ליחידת האוויר מועברים דרך קישור UART. יחידת האוויר של Datalink מעבירה את הזרמים הללו דרך קישור הנתונים ליחידת הקרקע; יחידת הקרקע מפרקת את הזרמים ומציגה אותם ל-GCS כזרם Ethernet יחיד (מצלמה וידאו ונתונים) וסדרה בודדת (UART/USB) זרם טלמטריה.
דרישות יחידת אוויר:
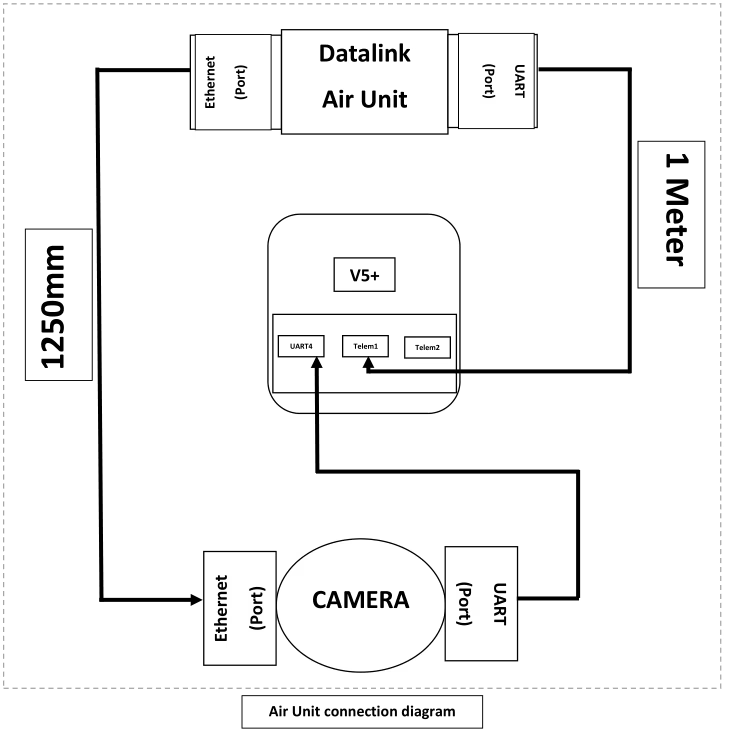
כל יחידת אוויר של Datalink (אחד לכל מל"ט) יעמוד בדרישות החובה הבאות:
1. ממשקים & נמלים (מִינִימוּם):
o 1 × יציאת UART (מִינִימוּם). יציאה זו תשמש לקישוריות טלמטריה/שליטה ל-FCC (יציאות טלמטריה Telem1 / Telem2 ב-FCC).
o 1 × יציאת Ethernet (מִינִימוּם). יציאה זו תשמש לקבלת נתוני Ethernet של מצלמה/מחפש.
2. קישוריות כבלים (נמסר עם יחידת האוויר):
o 1 × כבל UART (יְסוֹדִי) - אורך: 1.0 M (± 5%). כבל ישא TX, RX, GND ו-VCC. יש לסיים את הכבל כך שיתאים למחבר Datalink UART בקצה אחד ולמחבר הטלמטריה של FCC בצד השני.
o 1 × כבל Ethernet (יְסוֹדִי) - אורך: 1.0 M (± 5%). הכבל יהיה מסוכך סטנדרטי Cat5e או Cat6 תיקון כבל עם מחברי RJ45.
o 2 × ערכות חילוף (ליחידת אוויר) - כלומר., שני כבלי UART נוספים ושני כבלי Ethernet נוספים יסופקו עם כל יחידת אוויר (סה"כ מסופק ליחידה = 3 כבלי UART, 3 כבלי אתרנט).
3. מֵכָנִי & גוּפָנִי:
o כבלים צריכים להיות מקודים בצבע (מוּמלָץ) ובעלי סימוני כיווניות ברורים אם פינות אינן סימטריות.
4. חשמל/פרוטוקול:
o UART: תמיכה בקצבי baud נפוצים עד לפחות 921600 BPS. ספק פרמטרי UART הניתנים להגדרה על ידי המשתמש.
o אתרנט: תמיכה לפחות 100 פעולת Mbps (עדיף Gigabit). תמיכה בפרוטוקולי תחבורה נפוצים (UDP, RTSP לווידאו ו-UDP לשליטה) - בחירת פרוטוקול ספציפי תהיה ניתנת להגדרה.
דרישות יחידת הקרקע:
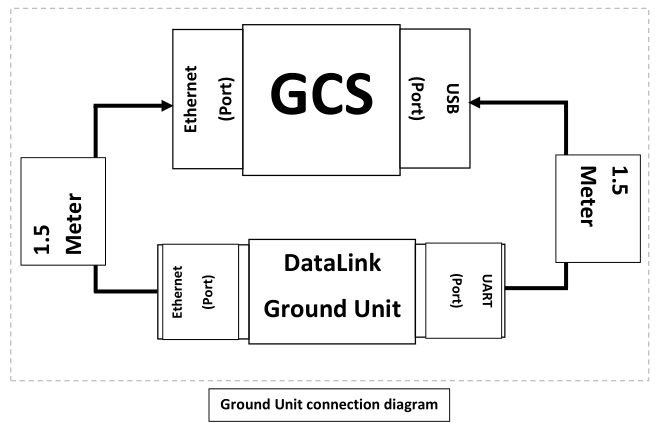
היחידה הקרקעית מבצעת demultiplexing של נתונים מכל ארבע יחידות האוויר ומציגה ממשק מאוחד ל-GCS. דרישות חובה הן:
1. ממשקים & נמלים (מִינִימוּם):
o 1 × יציאת UART (הוצג ל-GCS). היחידה הקרקעית תצבור זרמי טלמטריה מכל ארבע יחידות האוויר ותציג אותם ל-GCS כממשק UART/USB יחיד (לְמָשָׁל., יחידת הקרקע UART מחוברת לממשק USB ב-GCS).
o 1 × יציאת Ethernet (הוצג ל-GCS). יחידת הקרקע תאגיד זרמי מצלמה/וידאו ונתונים מארבע יחידות האוויר ותציג אותם כממשק Ethernet יחיד ל-GCS.
2. התנהגות צבירה:
o יחידת הקרקע תקבל ארבעה זרמי נתונים נכנסים עצמאיים (אחד מכל יחידת אוויר) ו-demultiplex אותם לזרם Ethernet משולב לזרם טורי משולב. מה-GCS’ פרספקטיבה יהיו רק קישור Ethernet אחד וקישור UART אחד להגדרה ולניטור.
o צבירה חייבת לשמור על כתובת מקור, כך שה-GCS יכול לזהות מאיזה זרם מגיע מאיזה ציפור. יחידת הקרקע לא תאבד מידע זיהוי לכל ציפור.
3. קישוריות כבלים (נמסר עם יחידת הקרקע):
o 1 × כבל UART (יְסוֹדִי) - אורך: 400 מ"מ (0.4 M). כבל יאפשר חיבור מיציאת UART של יחידת הקרקע ליציאת USB GCS (אם יחידת הקרקע UART היא UART ישירה, לספק כבל מתאם USB-UART). הכבל חייב לשאת TX, RX, GND ו-VCC.
o 1 × כבל Ethernet (יְסוֹדִי) - אורך: 400 מ"מ (0.4 M). הכבל יהיה מסוכך כבל תיקון Cat5e/Cat6 עם מחברי RJ45.
o 2 × ערכות חילוף - שני כבלי UART נוספים ושני כבלי Ethernet נוספים מסופקים כחלפים עם יחידת הקרקע.
4. חשמל/פרוטוקול:
o צבירה תהיה שקופה ביחס למסגרות Ethernet לווידאו; במידת הצורך, יחידת הקרקע עשויה לארוז מחדש זרמים לזרם הובלה יחיד אך חייבת לשמור על מידע תזמון וזיהוי מקור לכל ציפור.
o ריבוי טלמטריה: יחידת הקרקע תבצע ריבוי זמן או מנות זרמי טלמטריה לזרם UART יחיד עם מסגור ברור ותגים אופציונליים כדי להבחין בין הודעות לפי מזהה ציפור. הפרוטוקול המשמש לריבוי חייב להיות מתועד ונתמך על ידי תוכנת GCS.
קישוריות & מפרטי כבלים
סעיף זה מפרט את מפרטי הכבלים והמחברים המומלצים כדי להבטיח ביצועים אמינים בסביבות מוטסות וקרקעיות.
1. כבלי אתרנט (יחידת אוויר -> מצלמה ויחידת קרקע -> GCS): כבלי תיקון Cat5e או Cat6 מסוככים סטנדרטיים עם חיבורי RJ45. השתמש במיגון מלא (STP) כבל אם להתקנה יש EMI גבוה.
2. אורך Ethernet (יחידת אוויר): 1.0 m ±5%.
3. אורך Ethernet (יחידת קרקע): 400 מ"מ ±5%.
4. כבלי UART (יחידת אוויר -> טלמטריה של FCC): 4-כבל מוליך (TX, RX, GND, RTS/CTS אופציונלי). אורך: 1.0 m ±5%.
5. כבל UART (יחידת קרקע -> GCS USB/UART): 400 מ"מ ±5% (כולל מתאם USB-UART אם נדרש על ידי GCS).
6. מיגון כבלים והארקה: ספק קרקע משותפת והבטח שהמיגון יסתיים בקצה אחד לפי השיטות הטובות ביותר כדי למנוע לולאות הארקה. השתמש ב-RJ45 נעילה או במחברי נעילה אם צפויה רטט.
7. ספק כבלי מתאם לחיבור Datalink UART למחברי טלמטריה של CUAV V5+ (אם יחידת ה-Datalink לא חושפת מחבר תואם באופן טבעי).
8. היכן שהמצלמה תומכת ב-Power-over-Ethernet (PoE) אבל Datalink Air Unit לא מספקת PoE, לספק מזרק PoE.
פוּנקצִיוֹנָלִי & דרישות פרוטוקול
דרישות והמלצות פונקציונליות מרכזיות:
1. זיהוי לכל ציפור: כל זרם נתונים (וידאו או טלמטריה) חייב להיות מתויג עם מזהה ציפורים ייחודי כדי שה-GCS יוכל למפות זרמים לכלי רכב.
2. תוכנית ריבוי: יחידת הקרקע תטמיע ערכת ריבוי דטרמיניסטית לטלמטריה (UART) מאפשר ל-GCS לנתח ולנתב הודעות לפי Bird ID. 3. חביון ותפוקה: המערכת תצמצם למינימום זמן אחזור צבירה נוסף. 4. אֲמִינוּת: יחידת הקרקע חייבת לטפל באובדן זמני של יחידת אוויר אחת או יותר בחן ולהמשיך להציג את הזרמים הנותרים ל-GCS.
5. ממשק תצורה: ספק שיטת תצורה (מסמך מפורט) כדי להגדיר מזהי ציפורים, שיעורי העברת UART, וסדרי עדיפויות לכל זרם.
שאל שאלה
תודה רבה ששלחת את התשובה! ✨