이 시스템은 16개의 공중 데이터링크 공중 유닛으로 구성됩니다. (새당 한 마리), 단일 데이터링크 지상 유닛, 및 지상 제어 스테이션 (GCS). 목적은 인터페이스를 지정하는 것입니다., 케이블 길이, 포트 수, 공급업체가 배송한 장치가 기존 FCC와 상호 운용되도록 승인 테스트 (비행 제어 컴퓨터), 카메라 (구직자), 그리고 GCS.
데이터 링크를 구축하려면 완전한 솔루션이 필요합니다. 지상국 과 4 UAV 공중 유닛. 시스템은 안정적인 통신을 가능하게 해야 합니다., 제어, 모든 UAV를 동시에 모니터링. 자세한 기술 요구 사항은 아래에 나와 있습니다.
개요:
∙ 구성: 1 × 지상 제어 장치 (GCU) 의사소통하다 4 × 공중 유닛 (밖으로) ∙ 통신 유형: 지점 대 다중 지점 양방향 링크 (이더넷 + UART) ∙ 범위: ≥ 80 km 시선 (로스)
∙ 작동밴드: 1.4GHz의(L-대역)
∙ 변조 방식: TDD-OFDM / QPSK / 16-QAM
∙ 전력 요구 사항: 작동 전압 (12V), 현재 임계값 (2A 이하) ∙ 온도 범위: -20°C~75°C
데이터 처리량 및 대역폭:
| 모수 | 요구 사항 | 메모 |
| 비디오 데이터 속도 (구직자 당) | 5 - 9 Mbps의 | 1080피@ 30 fps H.264/265 압축 |
| 원격 측정 + 제어 (FCC에 따라) | 200 - 300 kbps | UART 기반 양방향 제어 데이터 |
| 총 비디오 처리량 (4 밖으로) | 24 - 36 Mbps의 | 결합된 비디오 업링크 |
| 집계 원격 측정/제어 | 1 Mbps의 | 영상에 비해 미미함 |
| 필요한 총 업링크 대역폭 | ≥ 36 Mbps의 | 와 함께 20% 독립 단기 치료소 + 간접비 ≒ 42 Mbps의 |
지연 시간 및 품질 요구 사항:
| 모수 | 요구 사항 | 메모 |
| 비트 오류율 | < 8×10-8 | 최대 범위에서 |
| 데이터 지연 | < 1MS | 실시간 탐색자 운용 및 데이터 전송에 필요 |
| 패킷 손실 | < 1% | FEC 포함 + ARQ 메커니즘 |
| 오류 수정 | 독립 단기 치료소 + CRC + ARQ | 원격 측정 안정성을 위해 필수 |
링크예산 & RF 매개변수:
| 모수 | 목표값 | 메모 |
| 전력을 전송하십시오 (에어 유닛) | 4 – 5 W | – |
| 전력을 전송하십시오 (지상 유닛) | 4 – 5 W | – |
| 안테나 게인 (에어 유닛) | >3dB | 안테나 패턴: 등방성 |
| 안테나 게인 (지상 유닛) | 12 - 18 dB | 지향성 안테나 |
| 수신기 감도 | -103dBm @ 10MHz | 10⁻⁵ BER의 경우 |
| 링크마진 @ 80 km | > 10 dB | 강력한 비디오 보장 + 데이터 링크 |
메모:
⮚ CUAV V5+ 비행 컨트롤러와 외부 주변 장치 간의 원활한 통합을 위해, UART 직기가 다음을 유지하는 것이 중요합니다. 직접적이고 복잡하지 않은 배선 구조. 구체적으로, UART 포트의 직기는 다음과 같이 설계되어야 합니다. 추가 변환기나 중간 보드를 도입하지 않고 단일 직선 연결. 이는 잠재적인 실패 지점을 최소화합니다., 대기 시간 감소, 가볍고 안정적인 배선 아키텍처를 보장합니다.
⮚ 게다가, 직기는 트랜지스터-트랜지스터 논리에서 작동해야 합니다. (TTL) 전압 레벨, V5+ 비행 컨트롤러는 TTL UART를 통해 통신하므로. TTL과의 편차 (RS-232 또는 RS-485 레벨과 같은) 외부 레벨 시프터 또는 변환기가 필요함, 이는 직접 직기의 요구 사항과 모순됩니다.. TTL 표준을 준수하여, 신호 호환성이 유지됩니다, 보장:
o V5+와 연결된 모듈 간의 직접 통신.
o 변환기 또는 변환기를 제거하여 하드웨어 복잡성 감소. o 무게 감소 및 신뢰성 향상, 신호 경로에 포함되는 구성 요소가 적기 때문에.
o 향상된 신호 무결성, 추가적인 변환 단계로 인해 노이즈나 타이밍 불일치가 발생할 수 있기 때문입니다..
결론적으로, 직기 설계는 TTL 전압에서 작동하는 직선형 UART 배선 장치를 엄격하게 제공해야 합니다., CUAV V5+ 전기 사양에 맞춰 항공 응용 분야에서 최적의 성능을 보장합니다..
시스템 개요:
개략적인 시스템 설명:
1. UAV 4대, 각각 갖추고:
영형 1 × 데이터링크 에어 유닛
영형 1 × FCC (비행 제어 컴퓨터, 예를 들어, 거짓 V5+)
영형 1 × 시커 / 카메라
2. 1 × 지상 제어 스테이션과 연결된 Datalink 지상 장치 (GCS).
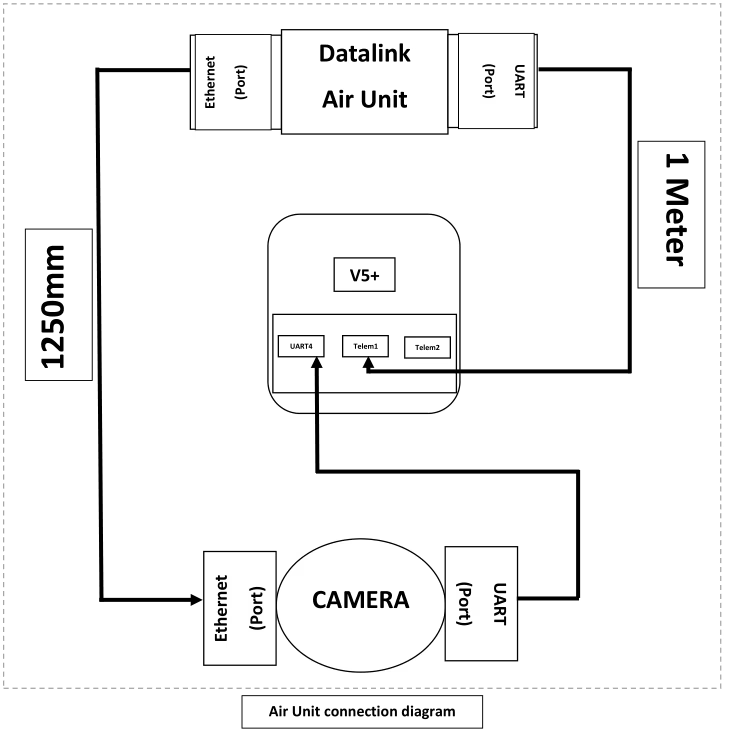
데이터 흐름 (개요): 각 카메라의 비디오 및 센서 데이터는 카메라의 이더넷 포트를 통해 연결된 Datalink Air Unit에 제공됩니다.. FCC와 Air Unit 간의 원격 측정 및 제어 데이터는 UART 링크를 통해 전달됩니다.. Datalink Air Unit은 이러한 스트림을 데이터 링크를 통해 Ground Unit으로 전송합니다.; 지상 장치는 스트림을 역다중화하고 이를 단일 이더넷 스트림으로 GCS에 제공합니다. (카메라 비디오 및 데이터) 그리고 단 하나의 연재물 (UART/USB) 원격 측정 스트림.
공중 유닛 요구 사항:
각 데이터링크 에어 유닛 (UAV 당 하나) 다음 필수 요구 사항을 충족해야 합니다.:
1. 인터페이스 & 포트 (최저한의):
영형 1 × UART 포트 (최저한의). 이 포트는 FCC에 대한 원격 측정/제어 연결에 사용됩니다. (원격 측정 포트 Telem1 / FCC의 Telem2).
영형 1 × 이더넷 포트 (최저한의). 이 포트는 카메라/시커 이더넷 데이터를 수신하는 데 사용됩니다.
2. 케이블 연결 (에어 유닛과 함께 제공):
영형 1 × UART 케이블 (주요한) - 길이: 1.0 미디엄 (± 5%). 케이블은 TX를 전달해야 합니다., RX, GND와 VCC. 한쪽 끝은 Datalink UART 커넥터, 다른 쪽 끝은 FCC 원격 측정 커넥터와 일치하도록 케이블을 종단 처리해야 합니다.
영형 1 × 이더넷 케이블 (주요한) - 길이: 1.0 미디엄 (± 5%). 케이블은 RJ45 커넥터가 있는 표준 차폐 Cat5e 또는 Cat6 패치 케이블이어야 합니다.
영형 2 × 예비 세트 (항공 유닛당) - 즉., 각 에어 유닛에는 2개의 추가 UART 케이블과 2개의 추가 이더넷 케이블이 제공됩니다. (장치당 총 공급량 = UART 케이블 3개, 3 이더넷 케이블).
3. 기계 & 물리적 인:
o 케이블은 색상으로 구분되어야 합니다. (추천) 핀아웃이 대칭이 아닌 경우 명확한 방향 표시가 있습니다.
4. 전기/프로토콜:
영형 UART: 최소 최대 공통 전송 속도 지원 921600 bps. 사용자 구성 가능한 UART 매개변수 제공.
영형 이더넷: 최소한 지원 100 Mbps 작동 (기가비트 선호). 공통 전송 프로토콜 지원 (UDP, 비디오용 RTSP 및 제어용 UDP) — 특정 프로토콜 선택이 구성 가능해야 합니다.
지상 유닛 요구 사항:
지상 유닛은 4개 항공 유닛 모두의 데이터를 역다중화하고 GCS에 통합 인터페이스를 제공합니다.. 필수 요구 사항은:
1. 인터페이스 & 포트 (최저한의):
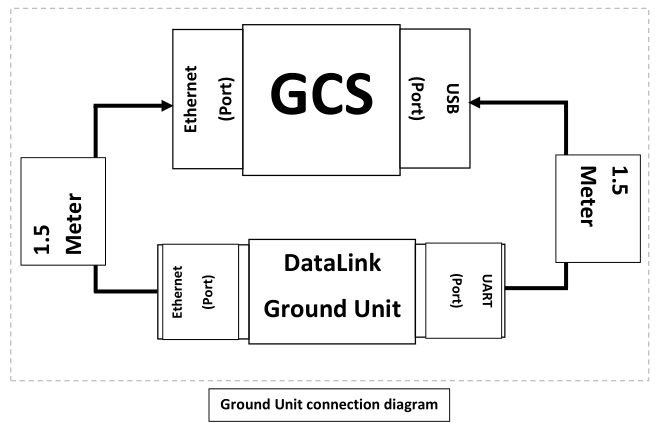
영형 1 × UART 포트 (GCS에 제출). 지상 장치는 4개의 항공 장치 모두에서 원격 측정 스트림을 집계하여 단일 UART/USB 인터페이스로 GCS에 제공해야 합니다. (예를 들어, GCS의 USB 인터페이스에 연결된 Ground Unit UART).
영형 1 × 이더넷 포트 (GCS에 제출). 지상 유닛은 4개 항공 유닛의 카메라/비디오 및 데이터 스트림을 집계하여 이를 GCS에 대한 단일 이더넷 인터페이스로 제공합니다.
2. 집계 동작:
o 지상 장치는 4개의 독립적인 수신 데이터 스트림을 수용해야 합니다. (각 항공 유닛에서 하나씩) 결합된 이더넷 스트림과 결합된 직렬 스트림으로 역다중화합니다.. GCS에서’ 관점에서는 구성하고 모니터링할 이더넷 링크와 UART 링크가 하나만 있어야 합니다.
o 집계는 소스 주소 지정을 유지해야 합니다., GCS는 어느 스트림이 어느 Bird에서 왔는지 식별할 수 있습니다.. 지상 유닛은 새별 식별 정보를 잃어서는 안 됩니다.
3. 케이블 연결 (지상 유닛과 함께 제공):
영형 1 × UART 케이블 (주요한) - 길이: 400 mm (0.4 미디엄). 케이블은 접지 장치 UART 포트에서 GCS USB 포트로의 연결을 허용해야 합니다. (지상 유닛 UART가 직접 UART인 경우, USB-UART 어댑터 케이블 제공). 케이블은 TX를 전달해야 합니다., RX, GND와 VCC.
영형 1 × 이더넷 케이블 (주요한) - 길이: 400 mm (0.4 미디엄). 케이블은 RJ45 커넥터가 있는 차폐형 Cat5e/Cat6 패치 케이블이어야 합니다.
영형 2 × 예비 세트 - 접지 장치와 함께 예비품으로 제공되는 추가 UART 케이블 2개와 추가 이더넷 케이블 2개.
4. 전기/프로토콜:
o 집계는 비디오용 이더넷 프레임과 관련하여 투명해야 합니다.; 필요한 경우 지상 유닛은 하천을 단일 전송 하천으로 재포장할 수 있지만 타이밍 정보와 새별 소스 식별을 보존해야 합니다.
영형 원격 측정 다중화: 지상 장치는 새 ID로 메시지를 구별하기 위해 명확한 프레임과 선택적 태그를 사용하여 원격 측정 스트림을 단일 UART 스트림으로 시간 다중화하거나 패킷화해야 합니다.. 다중화에 사용되는 프로토콜은 문서화되어야 하며 GCS 소프트웨어에서 지원되어야 합니다..
연결성 & 케이블 사양
이 섹션에는 공중 및 지상 환경에서 안정적인 성능을 보장하기 위해 권장되는 케이블 및 커넥터 사양이 나열되어 있습니다.
1. 이더넷 케이블 (에어 유닛 -> 카메라 및 지상 장치 -> GCS): RJ45 종단 처리된 표준 차폐 Cat5e 또는 Cat6 패치 케이블. 완전 차폐 사용 (STP) 설치에 EMI가 높은 경우 케이블을 연결합니다.
2. 이더넷 길이 (에어 유닛): 1.0 m ±5%.
3. 이더넷 길이 (지상 유닛): 400 mm ±5%.
4. UART 케이블 (에어 유닛 -> FCC 원격 측정): 4-도체 케이블 (TX, RX, GND, 선택적 RTS/CTS). 길이: 1.0 m ±5%.
5. UART 케이블 (지상 유닛 -> GCS USB/UART): 400 mm ±5% (GCS에서 요구하는 경우 USB-UART 어댑터 포함).
6. 케이블 차폐 및 접지: 접지 루프를 방지하기 위해 공통 접지를 제공하고 모범 사례에 따라 차폐가 한쪽 끝에서 종료되도록 합니다.. 진동이 예상되는 경우 잠금 RJ45 또는 래칭 커넥터를 사용하십시오.
7. Datalink UART와 CUAV V5+ 원격 측정 커넥터를 연결하기 위한 어댑터 케이블 제공 (Datalink 장치가 기본적으로 호환 가능한 커넥터를 노출하지 않는 경우).
8. 카메라가 PoE(Power-over-Ethernet)를 지원하는 경우 (PoE) 하지만 Datalink Air Unit은 PoE를 제공하지 않습니다., PoE 인젝터를 제공합니다.
기능적 & 프로토콜 요구 사항
주요 기능 요구 사항 및 권장 사항:
1. 새별 식별: 각 데이터 스트림 (비디오 또는 원격 측정) GCS가 스트림을 차량에 매핑할 수 있도록 고유한 Bird ID로 태그를 지정해야 합니다.
2. 다중화 방식: 지상 유닛은 원격 측정을 위한 결정론적 다중화 방식을 구현해야 합니다. (UART) GCS가 Bird ID로 메시지를 구문 분석하고 라우팅할 수 있도록 허용합니다. 3. 지연 시간 및 처리량: 시스템은 추가 집계 대기 시간을 최소화해야 합니다. 4. 신뢰할 수 있음: 지상 유닛은 하나 이상의 항공 유닛의 일시적인 손실을 적절하게 처리하고 나머지 스트림을 GCS에 계속 제공해야 합니다.
5. 구성 인터페이스: 구성 방법 제공 (상세한 문서) 새 ID를 설정하려면, UART 전송 속도, 스트림별 우선순위.
질문하기
응답해 주셔서 감사합니다. ✨