该系统由十六个机载数据链空中单元组成 (每只鸟一只), 单个数据链地面单元, 和地面控制站 (地面站). 目的是指定接口, 电缆长度, 端口数, 和验收测试,以便供应商交付的设备能够与现有 FCC 互操作 (飞行控制计算机), 相机 (探索者), 和全球控制系统。
需要一个完整的解决方案来建立数据链路 地面站 和 4 无人机空中单位. 系统应能够实现可靠的通信, 控制, 同时监控所有无人机. 详细技术要求如下。
概述:
∙ 组态: 1 × 地面控制单元 (通用控制单元) 与…沟通 4 × 航空单位 (出) ∙ 通讯类型: 点对多点双向链路 (以太网 + 串口) ∙ 范围: ≥ 80 公里视距 (这)
∙ 工作频段: 1.4千兆赫(L波段)
∙ 调制方案: 时分双工正交频分复用 / QPSK / 16-QAM
∙ 电源要求: 工作电压 (12V), 当前阈值 (≤2A) ∙ 温度范围: -20°C 至 75°C
数据吞吐量和带宽:
| 范围 | 要求 | 笔记 |
| 视频数据速率 (每个搜寻者) | 5 - 9 兆比特 | 1080p@ 30 fps H.264/265 压缩 |
| 遥测 + 控制 (根据联邦通信委员会) | 200 - 300 千比特每秒 | 基于UART的双向控制数据 |
| 聚合视频吞吐量 (4 出) | 24 - 36 兆比特 | 组合视频上行 |
| 聚合遥测/控制 | 1 兆比特 | 与视频相比可以忽略不计 |
| 所需上行链路总带宽 | ≥ 36 兆比特 | 和 20% FEC + 开销 ≈ 42 兆比特 |
延迟和质量要求:
| 范围 | 要求 | 笔记 |
| 误码率 | < 8×10-8 | 在最大范围内 |
| 数据延迟 | < 1小姐 | 实时导引头操作和数据传输所需 |
| 丢包 | < 1% | 带前向纠错 + ARQ机制 |
| 纠错 | FEC + CRC + ARQ | 遥测可靠性的强制要求 |
链路预算 & 射频参数:
| 范围 | 目标值 | 笔记 |
| 传输功率 (空中单位) | 4 – 5 w ^ | – |
| 传输功率 (地面单位) | 4 – 5 w ^ | – |
| 天线增益 (空中单位) | >3D b | 天线方向图: 各向同性 |
| 天线增益 (地面单位) | 12 - 18 D b | 定向天线 |
| 接收器灵敏度 | –103dBm @ 10 MHz | 对于 10⁻⁵ BER |
| 链接边距@ 80 千米 | > 10 D b | 确保稳定的视频 + 数据链路 |
笔记:
⮚ 用于CUAV V5+飞控与外围设备之间的无缝集成, UART 织机保持一个至关重要 直接且不复杂的接线结构. 具体来说, 来自 UART 端口的织机应设计为 单直线连接,无需引入任何额外的转换器或中间板. 这最大限度地减少了潜在的故障点, 减少延迟, 并确保轻量且可靠的布线架构。
⮚ 此外, 织机必须以晶体管-晶体管逻辑运行 (TTL) 电压等级, V5+飞控通过TTL UART进行通信. 与 TTL 的任何偏差 (例如 RS-232 或 RS-485 电平) 需要外部电平转换器或转换器, 这与直接织机的要求相矛盾. 遵守 TTL 标准, 保持信号兼容性, 确保:
o V5+ 和连接的模块之间的直接通信。
o 通过消除转换器或翻译器降低硬件复杂性. o 重量减轻并提高可靠性, 由于信号路径中涉及的组件较少.
o 改善信号完整性, 因为额外的转换级可能会引入噪声或时序不匹配.
综上所述, 织机设计应严格提供在 TTL 电压下运行的直通 UART 线束, 符合 CUAV V5+ 电气规格并保证机载应用中的最佳性能.
系统概述:
高级系统描述:
1. 四架无人机, 每个配备:
哦 1 × 数据链空中装置
哦 1 × 美国联邦通信委员会 (飞行控制计算机, 例如。, 假V5+)
哦 1 × 探索者 / 相机
2. 1 × 与地面控制站连接的数据链地面单元 (地面站).
数据流 (概述): 每个摄像机的视频和传感器数据通过摄像机的以太网端口提供给其关联的 Datalink Air Unit. FCC 和空中装置之间的遥测和控制数据通过 UART 链路传输. 数据链空中单元通过数据链将这些流传输到地面单元; 地面单元对流进行解复用并将其作为单个以太网流呈现给 GCS (摄像头视频和数据) 和一个连续剧 (串口/USB) 遥测流。
空气装置要求:
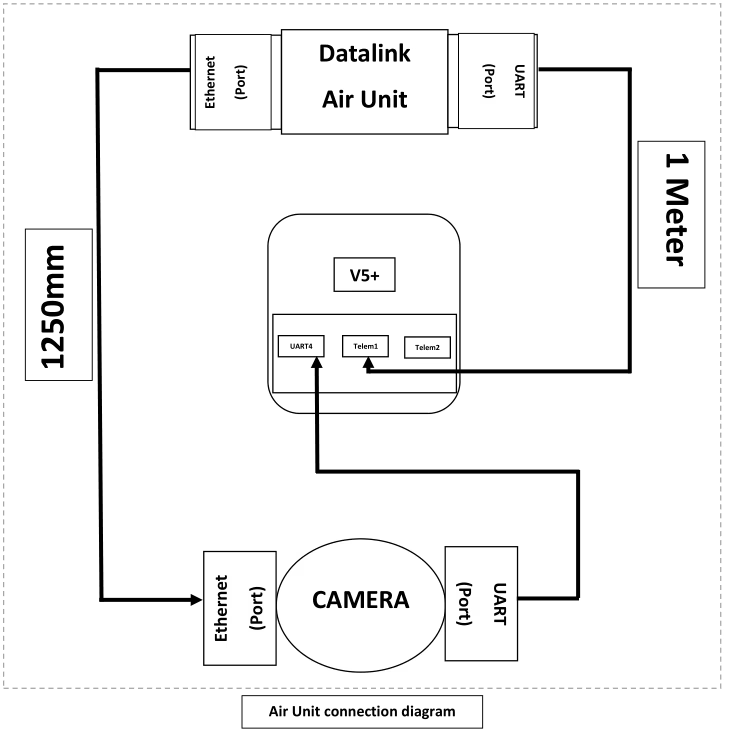
每个数据链空中单元 (每架无人机一台) 应满足以下强制性要求:
1. 接口 & 港口 (最低限度):
哦 1 × 串口 (最低限度). 该端口应用于 FCC 的遥测/控制连接 (遥测端口 Telem1 / Telem2 在 FCC 上的发言).
哦 1 × 以太网端口 (最低限度). 该端口用于接收摄像机/导引头以太网数据。
2. 电缆连接 (与空气装置一起交付):
哦 1 × 串口线 (基本的) - 长度: 1.0 米 (±5%). 电缆应携带 TX, 接收, 接地和VCC. 电缆的端接必须匹配一端的数据链路 UART 连接器和另一端的 FCC 遥测连接器。
哦 1 × 以太网电缆 (基本的) - 长度: 1.0 米 (±5%). 电缆应为带有 RJ45 连接器的标准屏蔽 Cat5e 或 Cat6 跳线。
哦 2 × 备用套 (每空气单位) - IE。, 每个天空单元应提供两根额外的 UART 电缆和两根额外的以太网电缆 (每台供应总量 = 3 根 UART 电缆, 3 以太网电缆).
3. 机械的 & 身体的:
o 电缆应采用颜色编码 (受到推崇的) 如果引脚排列不对称,则具有清晰的方向性标记。
4. 电气/协议:
哦 串口: 支持常用波特率至少可达 921600 基点. 提供用户可配置的UART参数.
哦 以太网: 至少支持 100 Mbps 操作 (千兆首选). 支持常用传输协议 (UDP, RTSP 用于视频,UDP 用于控制) — 具体协议选择应是可配置的。
地面单位要求:
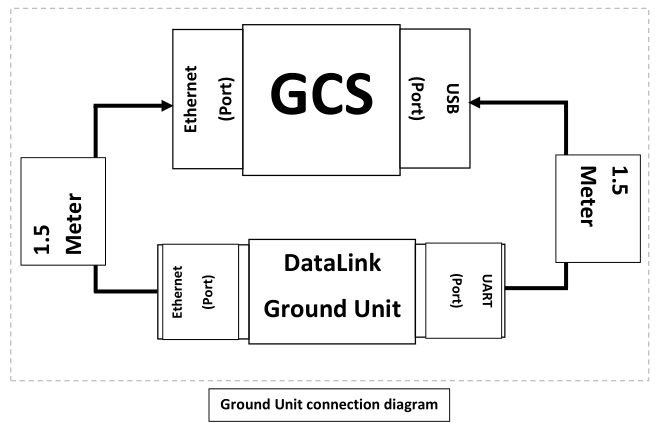
地面单元对来自所有四个空中单元的数据进行多路分解,并向 GCS 提供统一的接口. 强制性要求是:
1. 接口 & 港口 (最低限度):
哦 1 × 串口 (提交给 GCS). 地面单元应聚合来自所有四个空中单元的遥测流,并将它们作为单个 UART/USB 接口呈现给 GCS (例如。, 连接到 GCS 上 USB 接口的地面单元 UART).
哦 1 × 以太网端口 (提交给 GCS). 地面单元应聚合来自四个空中单元的摄像机/视频和数据流,并将它们作为单个以太网接口呈现给 GCS。
2. 聚合行为:
o 地面单元应接受四个独立的传入数据流 (每个空中单位一名) 并将它们解复用为组合的以太网流和组合的串行流. 来自全球气候系统’ 从角度来看,应该只有一个以太网链路和一个 UART 链路来配置和监控。
o 聚合必须保留源寻址, 所以 GCS 可以识别哪个流来自哪只鸟. 地面单位不得丢失每只鸟的识别信息。
3. 电缆连接 (与地面装置一起交付):
哦 1 × 串口线 (基本的) - 长度: 400 毫米 (0.4 米). 电缆应允许从地面单元 UART 端口连接到 GCS USB 端口 (如果地面单元 UART 是直接 UART, 提供 USB-UART 适配器电缆). 电缆必须带有 TX, 接收, GND 和 VCC。
哦 1 × 以太网电缆 (基本的) - 长度: 400 毫米 (0.4 米). 电缆应为带 RJ45 连接器的屏蔽 Cat5e/Cat6 跳线。
哦 2 × 备用套件 — 两根额外的 UART 和两根额外的以太网电缆作为地面单元的备件提供。
4. 电气/协议:
o 聚合对于视频以太网帧而言应是透明的; 如果需要,地面单元可以将流重新打包成单个传输流,但必须保留计时信息和每只鸟的源标识。
哦 遥测复用: 地面单元应将遥测流分时复用或打包成单个 UART 流,具有清晰的帧和可选标签,以通过鸟类 ID 区分消息. 用于多路复用的协议必须由 GCS 软件记录并支持.
连接性 & 电缆规格
本节列出了推荐的电缆和连接器规格,以确保在机载和地面环境中提供可靠的性能。
1. 以太网电缆 (空气装置 -> 摄像机和地面装置 -> 地面站): 带 RJ45 端子的标准屏蔽 Cat5e 或 Cat6 跳线. 使用全屏蔽 (直通车) 如果安装的 EMI 较高,请使用电缆。
2. 以太网长度 (空中单位): 1.0 米±5%。
3. 以太网长度 (地面单位): 400 毫米±5%。
4. 串口线 (空气装置 -> FCC 遥测): 4-导体电缆 (得克萨斯州, 接收, 地线, 可选RTS/CTS). 长度: 1.0 米±5%。
5. 串口线 (地面单位 -> 地面站USB/UART): 400 毫米±5% (如果 GCS 需要,包括 USB-UART 适配器).
6. 电缆屏蔽和接地: 提供公共接地并确保屏蔽按照最佳实践在一端终止,以避免接地环路. 如果预计会发生振动,请使用锁定 RJ45 或闭锁连接器。
7. 提供适配器电缆,用于将 Datalink UART 连接到 CUAV V5+ 遥测连接器 (如果数据链路单元本身不公开兼容连接器).
8. 摄像机支持以太网供电的地方 (以太网供电) 但Datalink天空端不提供PoE, 提供 PoE 注入器。
功能 & 协议要求
关键功能要求和建议:
1. 每只鸟的识别: 每个数据流 (视频或遥测) 必须用唯一的 Bird ID 进行标记,以便 GCS 可以将流映射到车辆。
2. 复用方案: 地面单元应实施确定性的遥测复用方案 (串口) 允许 GCS 通过 Bird ID 解析和路由消息。 3. 延迟和吞吐量: 系统应尽量减少额外的聚合延迟。 4. 可靠性: 地面部队必须妥善处理一架或多架空中部队的暂时损失,并继续向地面控制站提供剩余的信息流。
5. 配置界面: 提供配置方法 (详细的文件) 设置小鸟 ID, 串口波特率, 和每个流的优先级.
问一个问题
感谢您的回复。 ✨